As embodied intelligence and humanoid robots develop rapidly, dexterous hands are becoming key end effectors. They help robots operate in the real world.
Compared with ordinary grippers, dexterous hands must do more in limited space. They need multi-joint motion, stable grasping, fine force control, and some compliance. Therefore, actuators and transmission systems are core factors for industrial adoption.
From a technical-route view, there is no single actuator solution for dexterous hands. Motors can work with gears, worm gears, screws, electric cylinders, or tendons. Pneumatic and soft drives focus more on compliance and safety. Smart materials represent a more advanced bionic direction.
Each route has trade-offs. But in supply-chain maturity, control precision, cost, and mass-production reliability, motor drive is still the mainstream solution with the strongest industrial potential.
key Takeaways
- Dexterous hands need compact, precise, and reliable actuators.
- Motor drive remains the most practical industrial route.
- Linear electric cylinders focus on thrust and rigid positioning.
- DC geared motors focus on compact design and mass production.
- Tendon drive helps reduce finger weight and inertia.
- No single actuator solution is best for all dexterous hands.
- Future competition will depend on hardware, sensing, control, and AI integration.
Robotic Dexterous Hands Actuator Technology Routes
Actuators are the core basis for fine manipulation in robotic dexterous hands. They directly determine finger force, speed, precision, compliance, and reliability. Compared with ordinary grippers, dexterous hands have more degrees of freedom and more joints. Their internal space is also more limited. This raises higher requirements for power density, size, control precision, and service life.
As micro motors, reducers, screws, electric cylinders, and tendon-driven structures keep improving, the execution hardware of dexterous hands is also improving.
The motor-drive route is especially important. It has a mature supply chain, high control precision, stable engineering foundations, and good conditions for mass production. It has become the direction with the strongest industrial potential today.
In other words, dexterous hands are gradually gaining the hardware basis to move, grasp, and execute. The next key breakthrough is to give them an AI brain. This brain must sense the environment, understand tasks, and operate autonomously.
When analyzing dexterous-hand actuators, two concepts must be separated: the actuator and the transmission method.
The actuator generates power. The transmission method sends power to the finger joints. Take the motor route as an example. The same motor drive can form a linear electric cylinder through a screw. It can also form a rotary joint drive through a worm gear, planetary reducer, or harmonic reducer. It can also use tendons for remote transmission.
| Actuator / Drive Solution | Typical Structure | Main Features |
| T-Type Lead Screw Electric Cylinder | Motor + T-type lead screw | Simple structure and low cost. Suitable for low-speed finger structures that need position holding. |
| Ball Screw Electric Cylinder | Motor + ball screw | High efficiency and good precision. Suitable for medium loads and frequent positioning. |
| Planetary Roller Screw Electric Cylinder | Motor + planetary roller screw | High thrust, high stiffness, and long life. Suitable for high-end dexterous hands and heavy-load grasping. |
| Worm Gear Reducer Motor | Coreless motor / brushless motor + worm gear | Compact structure and strong reduction with torque increase. Suitable for mass-produced small dexterous hands. |
| Planetary Gearmotor | Motor + planetary gear reducer | High transmission efficiency and smooth output. Can work as an independent joint drive or a front-stage reducer. |
| Harmonic Reducer Motor | Motor + harmonic reducer | High precision and low backlash. Suitable for high-end precision joints. |
| Tendon-Driven Actuator | Near-base motor + spool + tendon | Can reduce finger weight. Suitable for high-DOF, lightweight, and human-like designs. |
Overall, this article focuses on motor-driven actuator routes with stronger engineering value today. Linear electric cylinders focus more on thrust and rigid positioning. DC gearmotors focus more on compact structure and mass-production reliability. Tendon-driven actuators focus more on lightweight and bionic structures.
Rigid Linear Transmission Actuators
In robotic dexterous hands, linear transmission actuators, or linear electric cylinders, play a core role. They provide strong power through push-pull force. This power supports finger flexion and extension, or wrist pitch and yaw.
Based on the internal threaded transmission element, linear electric cylinders mainly include T-type lead screw electric cylinders, standard ball screw electric cylinders, and planetary roller screw electric cylinders.
T-Type Lead Screw Electric Cylinder
The T-type lead screw is also often called a trapezoidal screw or sliding screw. It is an early and widely used linear transmission structure. It converts motor rotation into linear push-pull motion through sliding thread contact between the screw and the nut.

Compared with ball screws and planetary roller screws, the T-type lead screw has a simpler structure. Its manufacturing cost is lower. Its requirements for machining and assembly precision are also relatively lower.
The main advantages of a T-type lead screw electric cylinder are reliable structure and controllable cost. Under certain conditions, it can also provide self-locking. For robot fingers, self-locking means the finger can hold an object with less continuous power.
This helps reduce energy use. Therefore, this solution is suitable for low speed and medium-to-low loads. It is also suitable for cost-sensitive finger structures or structures that need position holding.
However, the T-type lead screw mainly uses sliding friction. Its efficiency is clearly lower than that of ball screws and planetary roller screws. In frequent start-stop, high-speed reciprocating, or high-precision positioning scenarios, sliding friction causes more wear, heat, and energy loss. Its force-control precision and motion smoothness are also limited. This is because friction is strongly affected by lubrication, materials, and load changes.
Therefore, the T-type lead screw electric cylinder is more suitable as a basic linear actuator solution. It is low cost and low speed. It can also provide some self-locking. If a dexterous hand needs higher efficiency, higher speed, and more stable precision positioning, a ball screw electric cylinder is needed.
Standard Ball Screw Electric Cylinder
The motion conversion of a standard ball screw electric cylinder depends on steel balls circulating between the screw shaft and the nut grooves. The contact between the balls and the raceways is mainly rolling friction.

This gives the cylinder high transmission efficiency, smooth motion, and a clear position-control model. It is suitable for frequent start-stop and precision positioning under medium loads.
In miniaturized designs, ball screw or guide screw electric cylinders can be highly integrated with coreless motors or brushless motors. They form compact linear actuators. This solution has a relatively mature structure, controllable cost, and high parts standardization. Therefore, it has value in small grippers, precision push rods, and some robot finger structures.
But ball screw electric cylinders also have natural limits. The load is mainly transferred through point contact between the balls and the screw raceway. When a dexterous hand performs high-strength grasping or faces external impact, stress concentration can occur in the contact area. This can damage the balls or raceway surface. It then affects transmission smoothness and positioning precision.
In addition, the ball return circulation structure also limits further miniaturization of screw lead. It also constrains maximum speed and acceleration.
Therefore, ball screw electric cylinders are more suitable for medium loads, high efficiency, and high-precision positioning. If a dexterous hand needs higher impact resistance, higher stiffness, and longer life, a planetary roller screw solution is needed.
Planetary Roller Screw Electric Cylinder
The planetary roller screw electric cylinder can be seen as the high-performance route among linear electric cylinders. Unlike ball screws, which transfer force through circulating balls, planetary roller screws use multiple threaded rollers. These rollers make planetary meshing motion around the main screw shaft.

The nut, rollers, and screw form a larger threaded contact area. This changes traditional point contact into more continuous line contact.
This structure directly brings higher load capacity, stronger stiffness, and better impact resistance. In the same volume, a planetary roller screw can usually bear higher axial loads. It also has better fatigue life and dynamic response.
For humanoid robots and high-performance dexterous hands, this means more thrust in a smaller space. It is suitable for heavy-load grasping, rigid positioning, and high-reliability joint drive.
In addition, a planetary roller screw does not need a ball return channel like a ball screw. Its motion is more continuous and smoother. It is also better for small-lead and high-reduction-ratio designs. When internal space in a dexterous hand is extremely limited, this high force density makes it an important direction for high-end miniature electric cylinders.
However, planetary roller screw electric cylinders are much harder and more expensive to manufacture. The rollers, screw, and nut need high-precision machining and synchronized meshing. Assembly, lubrication, and life management also have high requirements.
Therefore, it is more suitable for high-end humanoid robots, industrial dexterous hands, and heavy-load end effectors. It is not necessarily suitable for every low-cost or lightweight dexterous-hand solution.
| Comparison Dimension | T-Type Lead Screw Electric Cylinder | Ball Screw Electric Cylinder | Planetary Roller Screw Electric Cylinder |
| Transmission Method | Thread sliding friction | Steel ball rolling contact | Threaded roller rolling mesh |
| Precision | Medium | High | Very high |
| Thrust / Load Capacity | Medium-low | Medium-high | Highest |
| Speed | Relatively low | High | High |
| Transmission Efficiency | Relatively low | High | High |
| Self-Locking Ability | Good | Weak | Depends on lead and structure |
| Impact Resistance | Medium | Weak | Strong |
| Cost | Lowest | Medium | Highest |
| Miniaturization Difficulty | Low | Medium | High |
| Suitable Scenarios | Low-cost and low-speed finger structures that need position holding | Medium loads, high efficiency, and high-precision positioning | High-end dexterous hands, heavy-load grasping, and high-stiffness joints |
Overall, T-type lead screw electric cylinders focus on low cost, simple structure, and self-locking. Ball screw electric cylinders focus on high efficiency, precision positioning, and maturity. Planetary roller screw electric cylinders focus on high load, high stiffness, and long life. Together, these three routes form an important technical basis for rigid linear actuators in dexterous hands.
DC Gearmotor Actuators
Besides linear electric cylinders, DC gearmotors are also one of the most common and mature drive solutions in dexterous hands. This route usually places micro motors inside the joint or near the base. It then uses gears, worm gears, planetary reducers, or harmonic reducers to amplify output torque. This enables angle control and torque control of finger joints.
Worm Gear Reducer Motor
Worm gear reducer motors still have high engineering value in dexterous hands and small robotic fingers. The basic principle is simple. The motor drives the worm to rotate. The worm then drives the meshed worm wheel to output angular displacement. This achieves speed reduction and torque increase.

Traditionally, worm gear motors are often considered to have a large single-stage reduction ratio, compact structure, and some self-locking ability. For grippers or finger structures that need to hold a grasp for a long time, this holding ability can reduce the burden of continuous motor power.
However, in dexterous-hand design, a worm gear motor does not always mean complete self-locking or no backdrivability. The dexterous-hand solution designed by TSL MOTOR for customers can already achieve backdrivability through mechanical structure design. This is not affected even when our worm gear motors are used.
When combined with high-power-density motors, such as coreless DC motors and miniature brushless motors, worm gear motors can provide stable output in a small space. They also balance compact structure, controllable cost, and mass-production feasibility.
For dexterous hands that pursue miniaturization, reliability, and engineering implementation, this is a very competitive technical route.
Planetary Gearmotor
The planetary gearmotor is a very common integrated actuator unit in micro motor drives. It is usually made by integrating a coreless DC brushless motor with a planetary gear reducer.
Inside it, the sun gear, planet gears, and ring gear mesh with multiple teeth. This reduces speed and increases torque. It can provide stable speed reduction and torque amplification in a small volume.
Compared with ordinary gears or worm gear structures used alone, planetary gearmotors have several advantages. They are compact. They have relatively high transmission efficiency. Their output is smooth. They are also easy to integrate coaxially. Therefore, they are very suitable for space-limited dexterous-hand joints or palm drive modules.
For small robotic fingers, a planetary gearmotor can provide relatively high output torque in limited space. It can also maintain good response speed and control precision.
In real product design, a planetary gearmotor can also be combined with a worm gear reducer box. This forms a compound reduction structure of planetary gearmotor plus worm gear.
For example, the front-stage TSL MOTOR planetary gearmotor provides basic reduction and stable power output. The rear-stage worm gear further amplifies torque. It also balances holding force, backdrivability, and output stiffness based on the specific mechanical structure. For dexterous hands that need larger joint torque in a small volume, this compound transmission solution has high engineering value.
Of course, planetary gearmotors also require attention to backlash, noise, efficiency loss, and service life. This is especially true when multiple reduction stages are used or when they are combined with worm gears. Transmission clearance and assembly precision directly affect finger positioning precision, fine force control, and long-term reliability.
Overall, a planetary gearmotor can serve as an independent joint drive unit. It can also serve as the front-stage power module in a compound reduction system. In mass-produced dexterous hands, the combination of a coreless DC motor, planetary reducer, and worm gear reducer box is a practical solution. It balances size, torque, cost, and engineering reliability.
Harmonic Reducer Motor
A harmonic reducer motor is a high-precision rotary actuator unit formed by integrating a motor with a harmonic reducer. It is often used in robot joints that require compact structure, positioning precision, and low backlash.
The harmonic reducer uses elastic deformation meshing among the flexspline, circular spline, and wave generator. It reduces speed and increases torque. It has a large reduction ratio, compact structure, and low backlash.
In dexterous hands, miniature harmonic reducer motors can be combined with brushless motors, coreless motors, or frameless torque motors. They can be used for high-precision finger joints, thumb joints, or wrist joints.
Compared with ordinary gear reduction solutions, harmonic reducer motors have advantages in repeat positioning precision, transmission compactness, and low backlash. They are suitable for high-end dexterous hands that pursue high control precision and high integration.
However, harmonic reducer motors are more expensive. They also require higher machining precision, assembly precision, and material fatigue life. The flexspline must bear periodic elastic deformation for a long time. Its stiffness, life, and impact resistance must be considered carefully. Under high-frequency motion, heavy impact, or long continuous operation, the life and reliability of the harmonic reducer become important limits.
Therefore, harmonic reducer motors are more suitable for high-end humanoid robots, precision dexterous hands, and scenarios with high requirements for joint positioning precision. If a product focuses more on low cost, mass production, and impact durability, trade-offs are needed among harmonic reducer motors, planetary gearmotors, and worm gear compound transmission.
Tendon-Driven Actuators
Tendon-driven actuators are a very important technical route in dexterous hands. Strictly speaking, the tendon itself does not generate power. The real power source is usually still a motor, such as a coreless DC motor, brushless motor, miniature servo motor, or planetary gearmotor. The role of the tendon is to transfer power from the palm, back of the hand, or forearm to the finger joints.
The core value of this solution is spatial decoupling between the power source and the fingertip. If many motors and reducers are placed directly inside the fingers, the fingers become thicker and heavier. Distal inertia also increases. This is not good for fast response or fine grasping.
The tendon-driven solution places heavier motors and drive components near the base. Only cables, pulleys, guide holes, and joint structures remain inside the fingers. This makes the fingers slimmer, lighter, and more bionic.
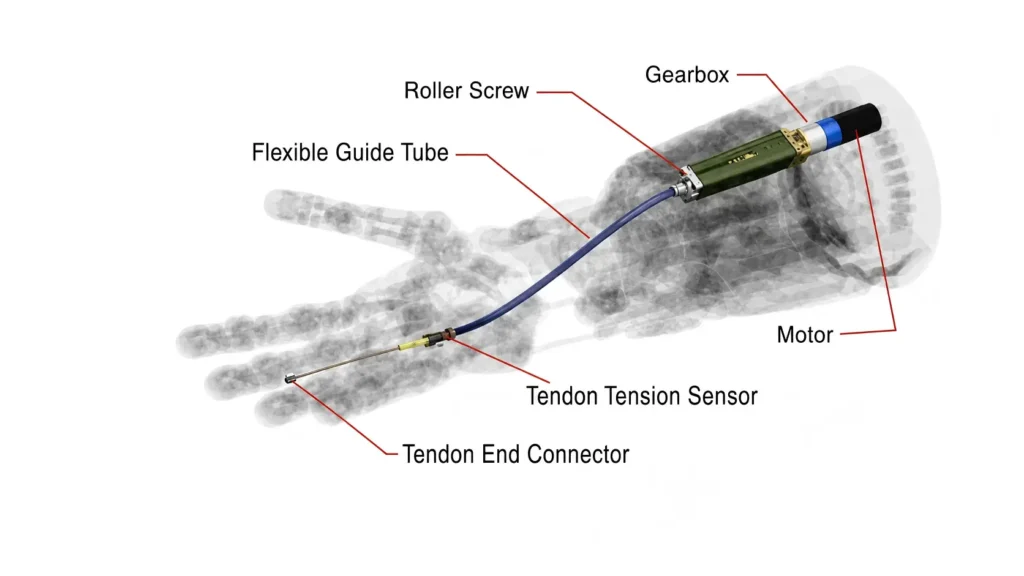
Structurally, a tendon-driven actuator usually consists of a motor, reducer, spool, tendon, guide structure, and finger joint. The motor drives the spool to wind and unwind the cable. The tendon then pulls the finger to bend, extend, or move sideways.
Depending on the number of tendons and routing paths, one finger can achieve single-joint drive, multi-joint linkage, or even underactuated adaptive grasping.
The tendon-driven solution is closest to the tendon structure of the human hand. There are no large muscles inside human fingers. Finger motion mainly depends on forearm muscles pulling through tendons.
Tendon-driven dexterous hands follow this idea. They place actuators near the base and drive the distal fingers with flexible cables. This makes them especially suitable for high-DOF, lightweight, and human-like dexterous-hand designs.
However, tendon-driven actuators also have clear challenges. Tendons must pass through many guide points and joints. The system can suffer from friction, slack, hysteresis, wear, and tension coupling. This is especially true when the wrist performs compound motions such as pitch and yaw. The tendon path changes in space. This may cause unstable tension, motion jitter, and force-control errors.
Therefore, high-performance tendon-driven dexterous hands usually need precise routing design, tensioning mechanisms, low-friction materials, and complex control compensation algorithms.
Overall, tendon-driven actuators are not a replacement for motor actuators. They are an optimization of motor drive in spatial layout. Through a near-base motor plus distal tendon structure, they reduce finger weight and distal inertia while maintaining high output capability. They are an important technical route for high-DOF human-like dexterous hands.
Typical Example 1: TSL Worm Gear Reducer Motor Dexterous-Hand Solution
In mass-produced dexterous hands, worm gear reducer motors are still a very practical actuator solution. They are usually composed of a coreless DC motor, a planetary reducer, and a worm gear reducer box. Multi-stage reduction enables high torque output in a small volume.
The core advantages of this solution are compact structure, controllable cost, and mature supply chain. It can also provide stable joint-driving force in limited finger or palm space.
Compared with solutions that rely fully on complex tendon routing, the transmission path of a worm gear reducer motor is more direct. Assembly and debugging are also easier. This makes it more suitable for dexterous-hand products aimed at batch delivery.
It should be emphasized that a worm gear does not necessarily mean complete self-locking or no backdrivability. In the TSL dexterous-hand solution, the mechanical structure design allows the worm gear reducer structure to keep high torque output. At the same time, it can also have certain backdrivability and compliance.
Therefore, for dexterous hands that need to balance output force, size, cost, and mass-production reliability, the combination of coreless motor, planetary reducer, and worm gear reducer box remains a very competitive engineering route.
This solution is especially suitable for small and medium dexterous hands, service-robot fingers, education and research dexterous hands, and mass-production customer scenarios with high cost and reliability requirements.
It does not necessarily pursue the highest degree of freedom or the most extreme bionic structure. But it has real value in stable grasping, batch manufacturing, and long-term operation.
Typical Example 2: Tesla Optimus Gen 3 Tendon-Driven Dexterous Hand
In high-DOF humanoid robot dexterous hands, tendon drive represents another more bionic technical direction. Take the Tesla Optimus Gen 3 dexterous hand as an example. Its hand architecture has evolved from motors built into the palm to centralized drive in the forearm and remote tendon transmission.
The core idea of this solution is to place heavier actuators in the forearm or near the palm. Multiple high-strength cables then pass through the wrist and palm. They transfer power to each finger joint. This can greatly reduce the weight of the fingers and lower distal inertia. It also makes the fingers closer to the slim proportions and motion forms of the human hand.
Structurally, each finger is usually driven by multiple control cables working together. Different routing paths achieve flexion, extension, lateral motion, and fingertip posture adjustment. The engineering challenges mainly lie in wrist cable routing, cable tension control, friction compensation, and multi-cable coupling control.
When the wrist performs compound motions such as pitch and yaw, the tendon path changes in space. This can easily cause tension fluctuation, increased friction, and torque crosstalk. Therefore, high-performance tendon-driven dexterous hands often need precise wrist routing mechanisms, low-friction guide structures, and complex control algorithms.
The advantages of tendon drive are light weight, high degrees of freedom, and bionic structure. Its weaknesses are complex routing, difficult calibration, and high maintenance requirements. It is more suitable for high-end dexterous hands that pursue high-DOF manipulation and humanoid robot applications.
Typical Example 3: Shadow Hand and DLR Smarthand
Besides humanoid robot companies, academia and the high-end research market have also long used tendon-driven or tendon-like solutions as dexterous-hand research platforms.
Shadow Dexterous Hand
It is a representative platform in high-DOF robotic-hand research. It uses a structure close to the size of a human hand.
Multiple groups of actuators and complex tendon routing drive each finger joint. It can reproduce a rich range of human-hand motions. It can also be combined with multimodal tactile sensors for teleoperation, reinforcement learning, and fine manipulation research.
However, such systems are usually expensive and structurally complex. Their forearm drive units and tendon maintenance costs are high. They are more suitable for research and high-end experiments, not low-cost large-scale deployment.
DLR Smarthand
It represents another tendon-driven hand design that emphasizes active variable stiffness and collision safety. Its core idea is to use multiple tendons, tensioning mechanisms, and elastic elements to control finger motion and compliance together. This gives the fingers better impact resistance during grasping and collision.

This type of solution shows an important development direction for tendon-driven dexterous hands. The goal is not only more degrees of freedom. It is also to improve finger safety, compliance, and environmental adaptability.
Conclusion: Motor Drive Is Still the Mainstream
Overall, there is no absolutely optimal actuator solution for robotic dexterous hands. Different technical routes match different design goals. Linear electric cylinders focus on thrust and rigid positioning. DC gearmotors focus on compact structure and mass-production reliability. Tendon-driven actuators focus on lightweight and human-like structures.
Whether it is a T-type lead screw electric cylinder, ball screw electric cylinder, planetary roller screw electric cylinder, worm gear reducer motor, planetary gearmotor, or harmonic reducer motor, the essence is the same. They all design different transmission forms around the motor as the power source.
Their difference is not about one route completely replacing another. It is about how to balance output force, speed, precision, cost, life, and maintainability in limited space.
For dexterous hands that pursue low cost and stable mass production, worm gear reducer motors, planetary gearmotors, and compound reduction solutions still have strong engineering value. For high-end humanoid robots and heavy-load grasping, high-performance solutions such as planetary roller screw electric cylinders and harmonic reducer motors have more advantages.
The future development of dexterous hands is not only about improving a single actuator. It is about system collaboration among actuators, transmission mechanisms, sensors, and control algorithms.
As execution hardware becomes mature, dexterous hands are moving from being able to move and grasp to being able to sense, judge, and operate.
What truly determines the next stage of competitiveness will not only be the motor or transmission inside the fingers. It will be whether the whole hand can complete complex real-world tasks under the control of an AI brain. It must do so stably, reliably, and intelligently.
FAQ
Q1: Why are actuators important in dexterous robotic hands?
Actuators provide the power for finger motion.They affect force, speed, precision, compliance, and reliability.
Q2: Why is motor drive still the mainstream solution?
Motor drive has a mature supply chain.
It also offers good control precision, stable performance, and strong mass-production potential.
Q3: What is the difference between an actuator and a transmission method?
The actuator generates power.
The transmission method transfers that power to the finger joints.

Dexterous Hand Drive Module
As a dedicated manufacturer of high-performance robotic components, we deliver advanced Dexterous Hand Drive Modules engineered for the next generation of humanoid robots and bionic hands. All our specifications are backed by rigorous, real-world laboratory measurements—ensuring reliable torque, precision, and longevity in demanding applications.
Whether your robotic hand design utilizes direct-drive (DD), linkage mechanisms, or cable-driven (tendon-driven) systems, our modular platform offers the exact actuation solution you need.