Looking back at the development of dexterous hands, you will find that the actuator almost defines the upper limit of their capabilities. In the early days, traditional servos were widely used.
They were low-cost and easy to use, but bulky, noisy, and slow to respond. They quickly failed to meet the dexterous hand’s requirements for precise movements.
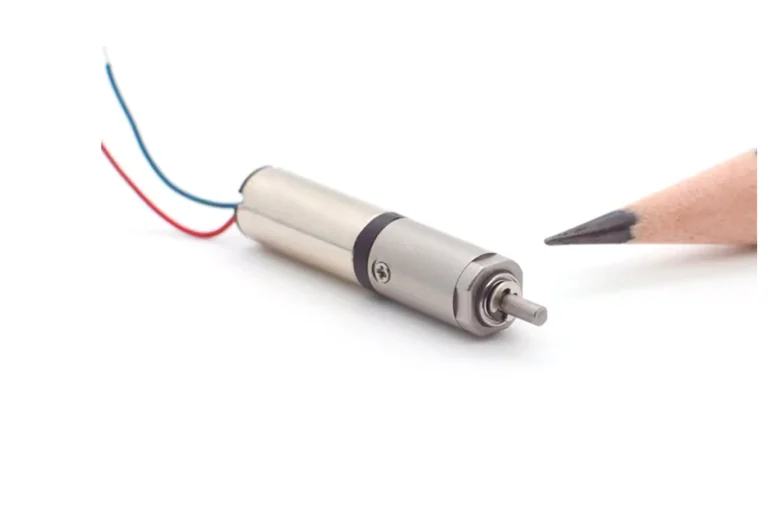
Later, brushed coreless motors made dexterous hands lighter and faster. However, their shortcomings, such as short service life and strong electromagnetic interference, limited their practical application.
As robots gradually enter real-world scenarios, the requirements for actuators have become more stringent: smaller size, faster response, quieter operation, higher efficiency, and accurate closed-loop control.
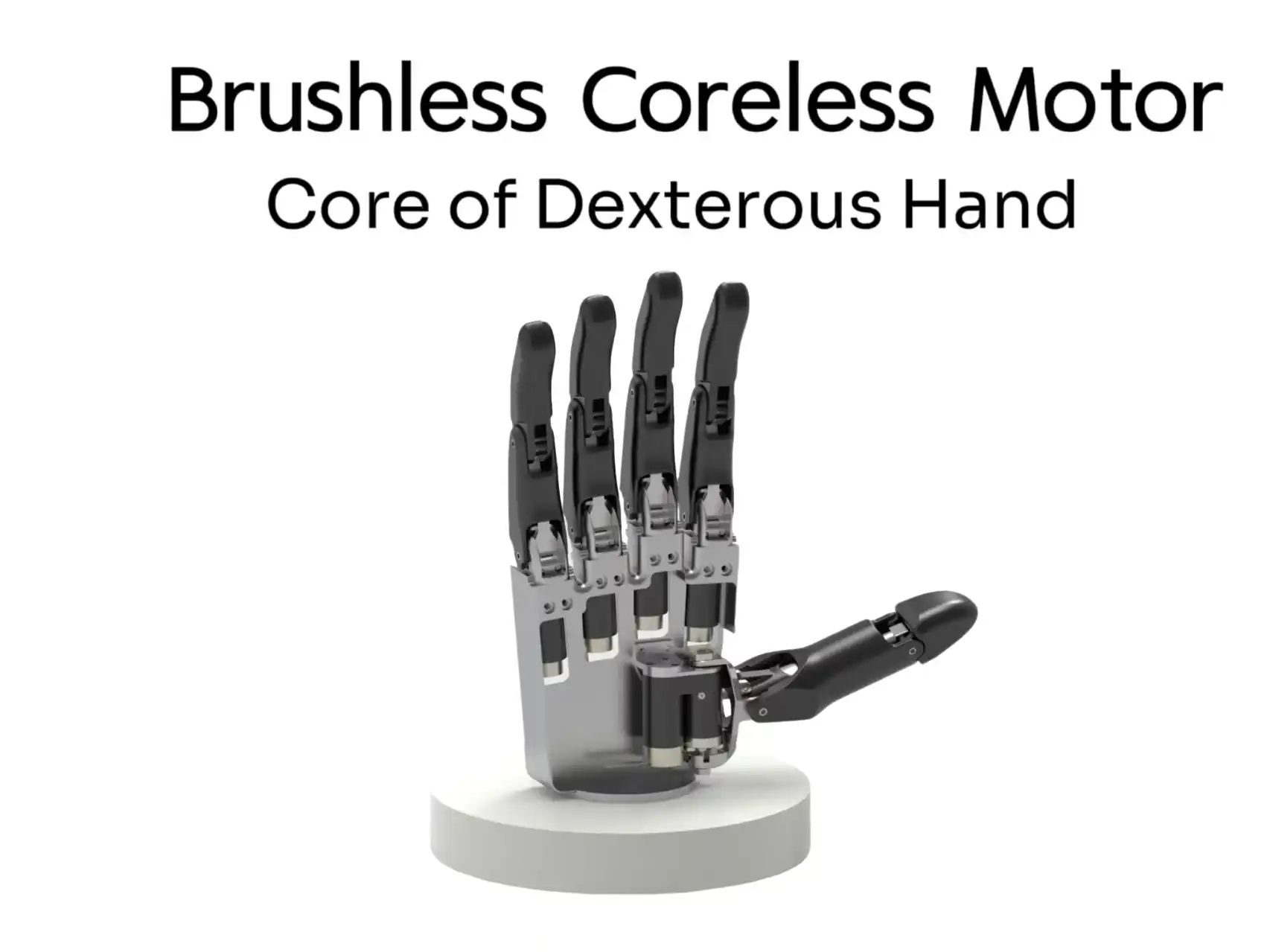
As a result, brushless coreless servo motors have become the mainstream solution. They combine the advantages of light weight, low inertia, high efficiency, and long service life, making them almost the ideal driving solution for dexterous hands.
Key Takeaways
- Actuators determine the performance upper limit of dexterous hands.
- Dexterous hands require high power density, fast response, high precision, low noise and long service life.
- Brushless coreless motors best match the core needs of dexterous hands.
- Brushed motors have shortcomings such as short life, high EMI and high noise.
- Brushless coreless motors adapt to all mainstream dexterous hand structures.
- This solution has been verified and applied by world-class dexterous hand products.
- Future trends: modularization, joint development and deep integration with intelligent systems.
Core Requirements for Dexterous Hand Motors
The core challenge for a dexterous hand is to achieve flexibility and control accuracy close to that of a human hand in an extremely limited space. Whether it adopts a direct drive, connecting rod, or tendon drive structure, its requirements for actuators are far higher than those of traditional mechanical systems.
A qualified motor must not only “be able to rotate”, but also balance force, speed, stability, and reliability in a tiny volume. These factors almost determine the performance ceiling of a dexterous hand.

High Power Density
The internal space of a dexterous hand is extremely limited. Each joint must house a motor, reducer, sensor, and control board in a millimeter-scale volume.
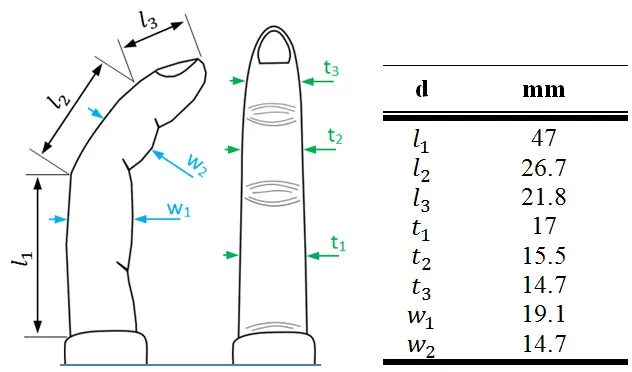
In comparison, the diameter of a human finger is usually only 16–20 mm, and the usable space inside the knuckle is even less than 10–16 mm. To achieve flexibility and force close to a human hand in such a compact structure, the motor must deliver sufficient torque, speed, and control accuracy in an extremely small size. Otherwise, it cannot drive a dexterous structure with high degrees of freedom.
Fast Response
The core of a dexterous hand’s “dexterity” lies in its ability to complete a series of delicate movements, such as grasping, sliding, pinching, and rotating, in a very short time. This imposes extremely high requirements on the dynamic performance of the motor, and rotational inertia is the key factor determining the response speed.
The lower the rotational inertia, the easier it is for the motor to accelerate or decelerate. This means faster action switching: from opening to pinching, from light touch to force application, all can be completed in milliseconds. It also enables more precise control, where tiny force or displacement commands are immediately reflected at the fingertip. In addition, it delivers better dynamic stability, with less risk of overshoot, jitter, or delay.
For high-degree-of-freedom, high-action-frequency systems like dexterous hands, low-inertia motors are almost a mandatory choice. They allow the robot to complete complex combinations of movements in an instant, just like a human hand, instead of lagging behind and chasing control commands.
Precise Control
The movements of a dexterous hand often take place on a millimeter or even finer scale. This means the control performance of the motor must be sufficiently “precise”. Any tiny jitter, delay, or non-linear output will be amplified at the fingertip, directly affecting the quality of grasping.
To achieve stable and predictable movements, the motor must maintain stability at low speeds, even at extremely low speeds, without the “jerking” caused by speed fluctuations.
It also needs extremely low cogging effect to avoid periodic resistance caused by magnetic pole switching, enabling smoother fingertip movements. In addition, it must deliver linear response, where every command from the controller is accurately and proportionally executed by the motor.
If these requirements are not met, the dexterous hand will suffer from jitter, stalling, overshoot, and other issues. This will make it impossible to complete fine operations, such as light touch, slip grasping, or force control tasks.

Low Noise
Dexterous hands are often used in scenarios such as service robots, medical assistance, rehabilitation training, and laboratory operations. Users have a low tolerance for noise in these scenarios; after all, no one likes noise.
Long Service Life
The action frequency of a dexterous hand is much higher than that of ordinary mechanical equipment. A dexterous hand needs to complete tens of thousands of start-stop cycles, repeated grasping and releasing, and long-term continuous operation every day. All these impose extremely high durability requirements on the motor.
This tests not only the motor itself, but also the bearings, windings, magnetic steel, reducer, and overall thermal management design. A long service life means less maintenance and higher reliability, and brings the dexterous hand closer to the standard of “truly usable for practical applications”.
Why Choose the Brushless Coreless Motor?
In an actual project, we optimized the actuator solution for a dexterous hand. The customer initially used an 8mm brushed motor, which performed normally in the prototype stage, but quickly exposed multiple key problems during continuous testing.
Pain Points of Brushed Motors
Electromagnetic Interference (EMI) Issues
The working principle of a brushed DC motor is to realize electronic commutation through brushes, thus driving the motor to run. Electric sparks are generated when the motor commutates, and these sparks cause significant electromagnetic interference (EMI).

EMI can cause inaccurate encoder signals, including signal jitter and pulse loss. This leads to unstable finger movements, inaccurate positioning, “jerking”, “stalling”, and other anomalies.
EMI can also cause problems for force sensors, such as reading jitter, increased noise, zero drift, and failure to accurately detect small forces. This may result in the dexterous hand being unable to stably control the grasping force. Gentle handling becomes erratic force application, and the hand may even crush objects.
EMI also affects the stability of the controller. The MCU, driver chips, and communication lines inside the controller are all susceptible to EMI. Interference on signal lines, corrupted communication data, and transient interference on the MCU can lead to abnormal movements, sudden shutdowns, and action delays of the dexterous hand.
Severely Insufficient Service Life
Brushed motors rely on the mechanical contact between carbon brushes and the commutator to complete commutation. This means that every rotation is accompanied by wear. The higher the speed and the heavier the load, the faster the wear occurs. Therefore, their service life is inherently limited.
The typical service life of a standard brushed motor is 200–400 hours. Even with measures such as longer carbon brushes and optimized materials, it is difficult to break through the 1000-hour threshold.
For application scenarios like dexterous hands that require high-frequency start-stop, high-frequency action switching, and long-term continuous operation, insufficient service life directly makes the whole machine unusable.
Insufficient Noise Control and Stability
Carbon brush friction itself generates noise. As service time increases, carbon brush wear leads to greater friction, and commutator surface wear causes increased vibration. The higher the speed, the more noticeable the noise becomes.
For scenarios such as service robots, bionic hands, and medical equipment, noise not only affects the user experience, but also compromises safety. A dexterous hand needs to be “as quiet as a human hand”, which brushed motors cannot achieve.
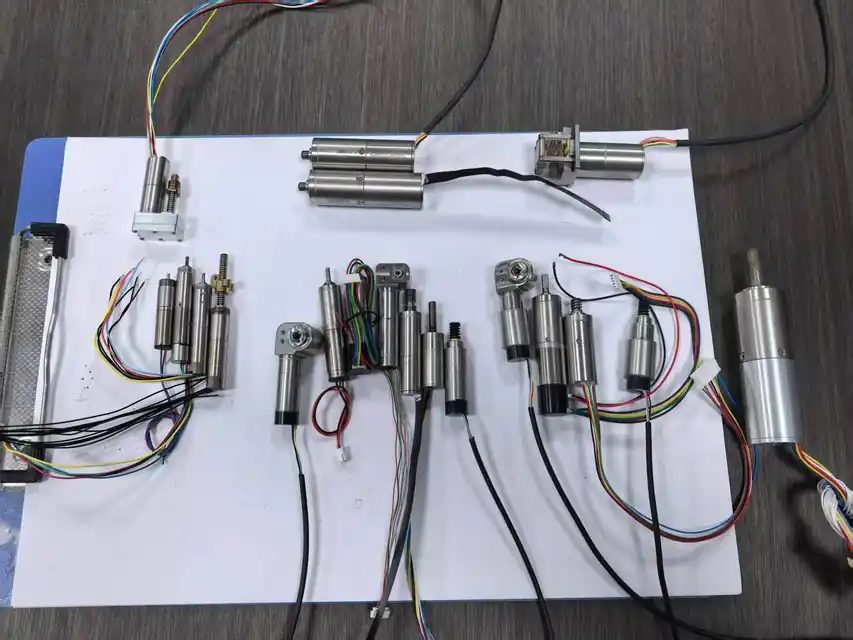
Adopting the Brushless Coreless Motor
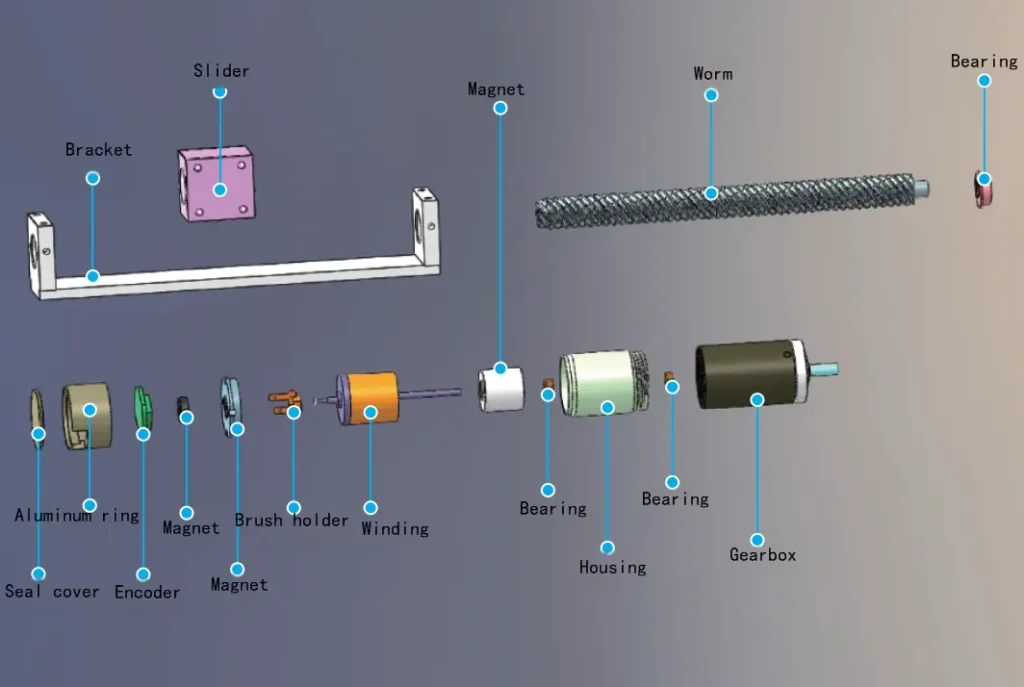
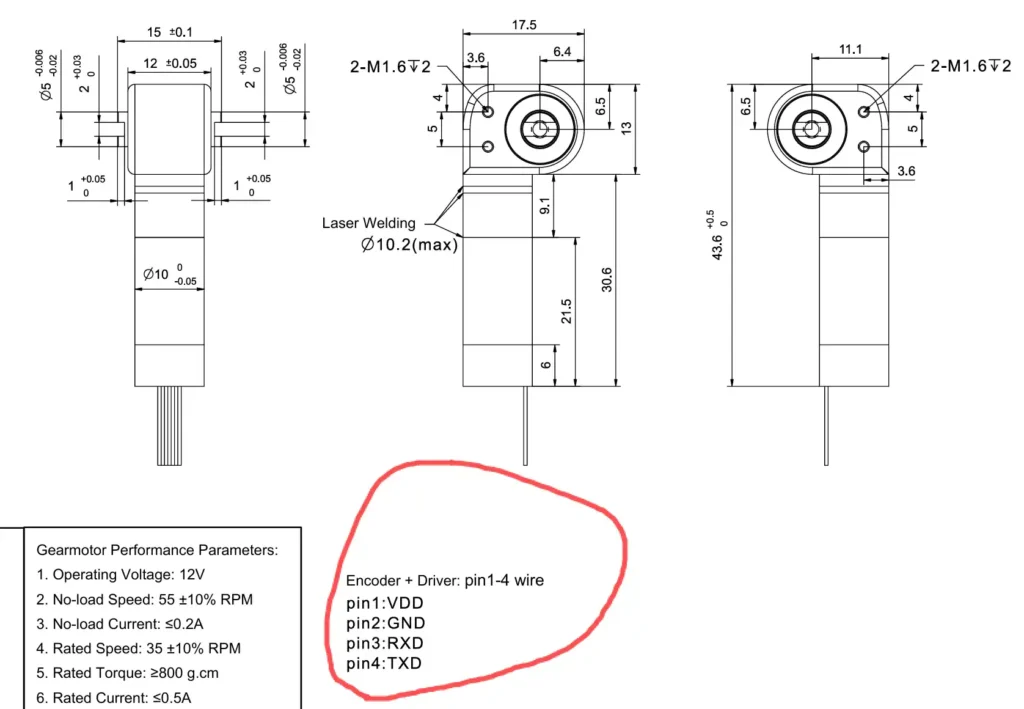
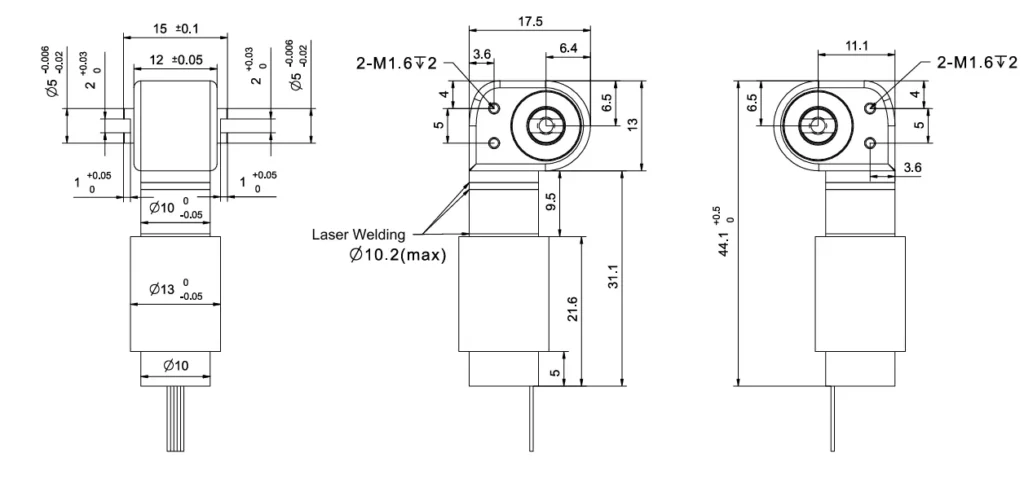
After re-evaluation, we switched the customer to an integrated servo brushless coreless motor solution combining a brushless coreless motor, a planetary gearbox, and a built-in driver. The motor can be driven by the host computer via only four wires, and the overall performance has been significantly improved.
Greatly Extended Service Life
Brushless motors adopt electronic commutation. This means that with this solution, the motor has no mechanical contact, no carbon brush wear, and no commutation sparks.
The typical service life of this type of motor can reach 1000–3000 hours or even longer, fully meeting the long-term operation requirements of dexterous hands.
No Electromagnetic Interference
The brushless structure of the motor means there are no brush sparks inside the motor. The source of EMI is eliminated, the signal link is cleaner, the readings of the encoder and force sensor are more stable, and the controller operates more reliably.

The system integrates a variety of precision components, including encoders, force sensors, and MCUs. These components are extremely sensitive to signal quality. Encoders need stable pulse signals to ensure position accuracy. Force sensors rely on weak signal changes to achieve precise control. The controller itself also needs a reliable communication and power supply environment. Any interference may cause signal fluctuations and even affect the overall control judgment.
The low EMI characteristic of brushless motors significantly improves the movement accuracy, force control stability, and response consistency of the entire system.
Lower Noise
Brushless coreless motors have inherent advantages in noise control. The brushless structure eliminates brush friction, so the motor produces almost no friction noise during operation. The coreless design eliminates the cogging effect, making rotation smoother. Even at high speeds, there is no sharp whistling noise. These features are particularly important in dexterous hand applications.
Dexterous hands are often used in high-precision scenarios such as service robots, bionic hands, medical auxiliary equipment, or laboratory operation equipment. These applications have extremely high requirements for noise — the movements must be as quiet as a human hand. Brushless coreless motors can exactly meet this demand. They not only ensure the quiet operation of the system, but also enable more natural movements and a better user experience.
Is the Brushless Coreless Motor Really the Only Option?
So, is the brushless coreless motor really the “only option” for dexterous hands? The answer is no, but it is indeed almost the optimal solution at present. There are several other motor solutions on the market, but all have varying degrees of limitations.
Although traditional brushed motors are small in size and low in cost, carbon brush wear is inevitable. Their service life is usually only 200–400 hours, and they require frequent maintenance during long-term operation. This makes them unable to meet the long-term stable operation requirements of dexterous hands.

Stepper motors have certain advantages in precision control, but their working principle determines that they will produce significant vibration during high-speed operation. They also have low efficiency, making them unsuitable for energy-sensitive mobile systems.

Servos have comprehensive performance, but their relatively large size makes it difficult to achieve a compact layout in space-constrained applications like dexterous hands.

Although direct drive motors can eliminate the loss caused by the reduction mechanism, they either have insufficient torque or excessively high cost, making them unsuitable for large-scale deployment.
In contrast, the brushless coreless motor combined with a planetary gearbox solves the problems of service life, stability, and noise. It also delivers sufficient torque in a limited space, with fast response and high control accuracy. It achieves the best balance in almost all indicators.

This is why it has become the mainstream choice in high-end dexterous hands and precision grasping systems. It is not the only option, but it is absolutely one of the most reliable engineering solutions.
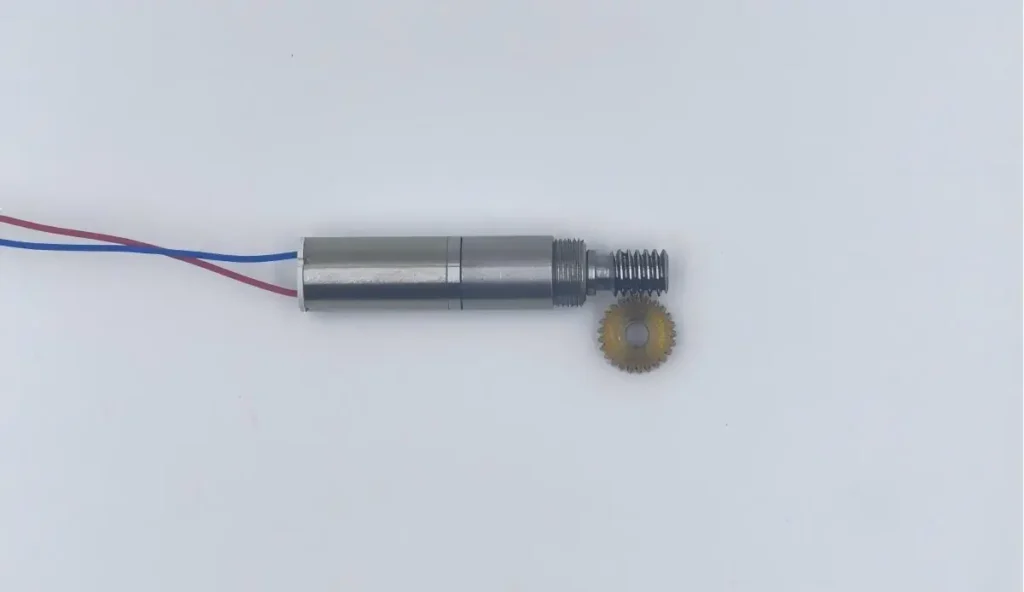
TSL’s integrated micro servo further integrates these advantages. It adopts a brushless coreless motor, combined with a planetary gearbox and worm gear output, and has a built-in driver to achieve a high degree of integration. Users only need to connect the host computer via four wires to easily drive the entire system, making installation and control very simple.
This design delivers excellent performance in accuracy, torque, and response speed, making it ideal for high-demand applications such as dexterous hands, micro robots, and precision operation equipment. However, high integration and excellent performance also mean relatively high cost, which is a point that needs to be weighed.
| Motor Solution | Advantages | Limitations |
| Brushed Motor | Low cost, simple structure | Short service life, maintenance required, susceptible to interference |
| Stepper Motor | High accuracy, simple control | Significant vibration at high speed, low efficiency |
| Servo | Controllable accuracy, stable performance | Large size, high cost |
| Direct Drive Motor | Fast response, no reduction loss | Limited torque or high cost |
| Brushless Coreless Motor + Planetary Gearbox | Long service life, low noise, low EMI, compact size with high torque | Higher cost than brushed motors |
| TSL Integrated Micro Servo Motor | High integration, simple control | Highest cost |
How to Adapt Brushless Coreless Motors to Different Dexterous Hand Structures
Many people only focus on the parameter table when selecting a motor, but ignore that the core requirements for the motor are completely different for different dexterous hand structures. Choosing the right adaptation direction can maximize the performance of the motor. Here, we explain the core logic of adaptation in detail for the three most common structures in the industry.
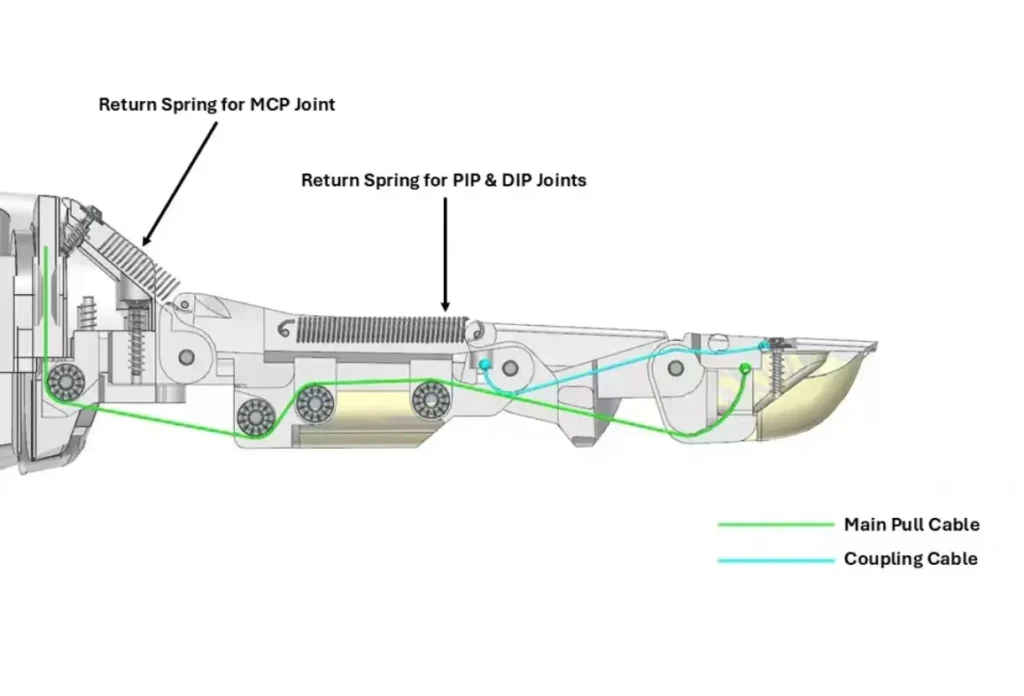
Tendon-Driven Dexterous Hands
The core feature of the tendon drive structure is that the motors are not placed in the finger joints, but centrally arranged in the palm or arm, driving the finger movements through traction tendons. This structure has relatively loose restrictions on the size of the motor, but extremely high requirements for speed stability, response speed, and synchronization.
Because the traction tendon itself has slight elasticity, even a few milliseconds of delay in the motor’s response will cause obvious lag in the fingertip movement.
When adapting to this type of structure, priority should be given to high-speed, low-inertia brushless coreless motors. There is no need to blindly pursue extreme miniaturization.
Instead, more attention should be paid to the performance consistency of motor batches and the stability under high-speed operation, to ensure that the coordinated movements of multiple traction tendons are accurate and controllable.
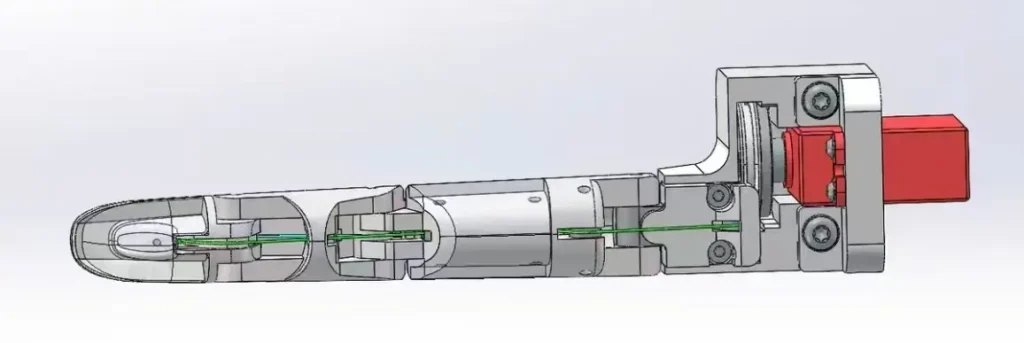
Connecting Rod / Direct Drive Dexterous Hands
For this type of structure, the motor needs to be directly integrated inside the finger knuckle, where the space is compressed to the extreme. This is also the most demanding scenario for motors. The inside of the knuckle must accommodate not only the motor, but also the gearbox, encoder, driver board, and even the force sensor. For a five-finger dexterous hand, the available space is often no more than 16mm.
When adapting to this type of structure, the core priorities are power density and integration. A miniature brushless coreless motor with a diameter of 10-13mm must be selected. Priority should be given to solutions with a built-in encoder and matched low-backlash miniature planetary gearbox, to simultaneously meet the requirements for torque, accuracy, and installation size in a limited space.
At the same time, special attention should be paid to the operating efficiency and heat generation of the motor. After all, the closed knuckle space has almost no heat dissipation conditions. Excessive heat will not only affect the accuracy of the sensor, but also accelerate the aging of parts.
Modular Joint Dexterous Hands
This type of structure is mostly used in industrial-grade dexterous hands or the end effectors of collaborative robots. Each finger joint is an independent modular unit, with high requirements for installation convenience and maintainability.
When adapting to this type of structure, priority should be given to brushless coreless motor solutions with medium integration and high standardization. The best choice is a standardized module with the motor, gearbox, and encoder pre-assembled, such as TSL’s 10mm diameter integrated micro servo motor.
This can not only reduce the workload of assembly and debugging, but also ensure the performance consistency of each modular joint, and make subsequent maintenance and replacement more convenient.
Reference of Real-World Solutions from Mainstream Dexterous Hands in the Industry
The brushless coreless motor has become the mainstream not because of theoretical advantages in parameters, but because it has been verified by the world’s top robotics teams through a large number of practical projects.
For example, the world-famous Shadow Dexterous Hand, a benchmark multi-fingered dexterous hand in the industry, adopted brushed coreless motors in its early versions. During long-term use, it encountered problems such as insufficient service life and electromagnetic interference affecting force control accuracy. Its subsequent upgraded versions fully switched to the brushless coreless motor solution, which not only increased the service life by several times, but also achieved a qualitative leap in force control stability and movement accuracy.
The dexterous hand equipped on Boston Dynamics’ humanoid robot Atlas also adopts a customized brushless coreless servo solution to achieve stable grasping during running and jumping and precise operation in complex environments. The core reason for this choice is its low inertia, fast response, and high reliability, which can cope with the extreme high-frequency and heavy-load usage scenarios of the robot.
Many domestic manufacturers of industrial collaborative robots and service robots in China have also adopted brushless coreless motors as the default actuator solution in their new generation of dexterous hand products. A mature supply chain and adaptation system has been formed from laboratory prototypes to mass production and commercialization.
Future Cooperation Trends Between Motor Manufacturers and Dexterous Hand Manufacturers
As dexterous hands move from laboratory prototypes to large-scale mass production, the cooperation between motor manufacturers and robot manufacturers is no longer a simple “product buying and selling” relationship. Instead, it is developing towards in-depth joint development.
The core future trend is that motor manufacturers will intervene in the initial design stage of dexterous hands in advance. In the past, customers first designed the structure of the dexterous hand, and then looked for a motor to adapt to it. This often led to problems such as insufficient space and substandard performance, requiring repeated drawing revisions and delaying the R&D progress.
Now, we have carried out joint development with a number of leading humanoid robot and industrial dexterous hand manufacturers. We intervene in the early stage of the customer’s dexterous hand structure design, and customize an exclusive integrated motor and gearbox solution according to the customer’s performance requirements and space constraints.
This not only helps customers shorten the R&D cycle by more than 30%, but also greatly reduces the comprehensive cost of mass production through structural optimization.
Another clear trend is standardized modular solutions. In response to the R&D needs of many small and medium-sized teams, we are gradually launching standardized micro servo modules adapted to different joints of dexterous hands. These modules integrate the motor, planetary gearbox, encoder, and driver all in one.
Customers no longer need to carry out complex adaptation and debugging by themselves. They can directly select the corresponding module to quickly complete the design and testing of the entire hand, greatly lowering the R&D threshold for dexterous hands.
The popularization of modular solutions will eventually drive the industry to form a unified standard model system. At present, the dexterous hand industry is still in the early stage of development. There is no unified standard for motor installation dimensions, interface definitions, and performance grading among different manufacturers. This is also one of the core reasons why many teams encounter repeated pitfalls during development.

In the future, with the large-scale commercialization of the industry, brushless coreless motors adapted to different joints and load levels of dexterous hands will definitely form universal standard models, just like the mature standard system of industrial servo motors today.
This will not only further reduce the R&D and procurement costs of the entire industry, but also promote the maturity and optimization of the entire supply chain, enabling more small and medium-sized teams to develop their own dexterous hand products at low cost and high efficiency. This is also the direction we have been continuously promoting in our product layout.
In addition, there is a deeper core trend in the industry — the deep integration of actuator hardware and the robot’s “brain”. Now the global robotics industry has reached a consensus: whoever masters the intelligent control system of robots holds the core voice in the future of robots and dexterous hands.
Current brushless coreless motors can perfectly execute every command sent by the host computer, achieving precise position, speed, and force control, but this is far from enough. The core advantage of the human hand is never the ability to accurately complete preset actions.
It is the ability to independently judge how much force to apply, when to adjust the force application method, and how to respond quickly to unexpected situations at the moment of touching an object, without the need for complex preset instructions in advance.
This means that the brushless coreless motor of the future will no longer be an isolated execution hardware, but an organic extension of the robot’s intelligent control system.
As a motor manufacturer, our core R&D direction in the future will no longer only be to improve the performance parameters of the motor itself, but also to deeply adapt the hardware characteristics of the motor to the intelligent decision-making algorithm and force control perception system of the robot.
For example, we will enable the motor to respond faster to the dynamic commands of the intelligent system, feed back operating status and force data more accurately, and even integrate basic edge computing capabilities at the motor end.

This will make the action response of the fingertip closer to the instinctive reaction of the human hand, and truly realize the leap from “moving according to instructions” to “independently judging force application”.
In general, the reason why the brushless coreless motor has become the core solution for dexterous hand actuators is never a single technological breakthrough.
It is the continuous iteration of upstream motor manufacturers in technology, quality control, and customization capabilities, which has gradually turned the ideal parameters in the laboratory into products that can be mass-produced on a large scale and operate stably for a long time in real scenarios.
For dexterous hand development teams, choosing the right motor solution is only the first step. Finding a manufacturer partner that understands your application scenarios, has stable independent R&D and production capabilities, and can accompany you from prototype verification to large-scale mass production is the key to the successful implementation of the project.
If you encounter any problems in the process of custom selection, parameter matching, or mass production implementation of dexterous hand motors, you can communicate with us. We will provide you with our more than ten years of R&D and production experience in miniature coreless motors for reference without reservation.
Conclusion
The brushless coreless motor has ultimately become the core solution for dexterous hand actuators not by virtue of any overwhelming technical advantage, but by delivering the most balanced and reliable performance among all available motor solutions, aligned with the core requirements of dexterous hands throughout their full life cycle.
It perfectly matches the dexterous hand’s core demands for high power density, low-inertia fast response, high-precision control, low noise and long service life. It fundamentally solves the inherent pain points of traditional solutions such as servos and brushed motors, providing a solid hardware foundation for dexterous hands to break through their performance ceiling.
Meanwhile, it has extremely strong scenario compatibility, adaptable to almost all mainstream dexterous hand structures. Fully verified by mass production projects of the world’s top robotics teams, it has become the industry-recognized optimal solution.

For dexterous hand development teams, there is no absolutely “perfect” motor, only the solution that best fits the project requirements. Only by first clarifying your structural characteristics, application scenarios, R&D stage and mass production plan, then reversely selecting the corresponding motor products and cooperation modes, can you avoid selection pitfalls and maximize hardware performance.
In the future, with the continuous explosive growth of humanoid robots, medical rehabilitation, precision industrial manufacturing and other fields, the application boundaries of dexterous hands will continue to expand.
We will also keep polishing our miniature coreless motor technology and solutions, accompany more development teams through the full process from prototype verification to stable mass production, and drive dexterous hand technology from laboratories to wider real-world application scenarios.
FAQ
Q1:Why do dexterous hands prefer brushless coreless motors?
A1:They offer the best balance of small size, fast response, high precision, low noise, and long life.
Q2:Can brushed motors be used for dexterous hands?
A2:Yes, but they have short life, high EMI, and loud noise, failing long-term stable use.
Q3:Is this motor suitable for all dexterous hand structures?
A3:Yes. It fits tendon-driven, direct-drive, and modular joint designs with proper sizing.
TSL-Motor: Custom Motor Solutions
Established in 2012, TSL Motor has evolved into a leading innovator in precision drive systems and specialized motor manufacturing. Our 10,000㎡ advanced production facility in Shenzhen houses a skilled workforce of 200+ professionals, delivering an annual output of 2 million units to global markets.
Continuous R&D investment in energy-efficient motor technologies
Lean manufacturing processes ensuring cost-competitive pricing
Agile production capacity scaling for batch customization
Global compliance certifications (CE, RoHS, REACH)
With dual focus on operational excellence and client success, Twin Motor empowers businesses worldwide to achieve technological differentiation. Our engineering team welcomes complex challenges across automotive, robotics, and smart infrastructure applications.
Contact our solutions center to discuss your project requirements or request our technical portfolio.

Coreless Gear Motor
A coreless gear motor is an electric motor that uses a rotor without an iron core. Instead, the rotor consists of a fine wire coil. This design reduces the moment of inertia, making the motor lighter and more efficient.