Dexterous hands serve as the core end-effectors in humanoid robots, service robots, prosthetics, and teleoperation systems.Compared with ordinary two-fingered grippers, dexterous hands not only grasp but also pinch, envelop, manipulate tools, perform in-hand manipulation, and adapt compliantly to the environment.
Human hand dexterity comes from fingers with multiple joints in series, where different joints move complexly under the coordination of tendons, ligaments, and muscles.
To mimic this structure, a robotic dexterous hand must first address three fundamental questions: How many joints does it have? How many degrees of freedom? And how many motors actively drive these degrees of freedom?
Key Takeaways
- Robotic dexterous hands mimic human anatomy to perform complex in-hand manipulation beyond simple grasping.
- Degrees of freedom (DOF) define a hand’s mobility, categorized into active, passive, and underactuated types.
- Underactuated designs balance cost and complexity by using fewer motors to achieve adaptive, compliant grasping.
- Coreless motors with gearboxes offer the high power density and quick response required for tight finger spaces.
- Highly integrated finger joint modules represent the future of precise force control and modular maintenance.
- Cable (tendon) drive minimizes finger weight by moving motors to the palm, but introduces friction and tension wear.
- Linkage and direct drives provide superior rigidity and reliability, making them ideal for high-load industrial tasks.
The Structure of a Dexterous Hand
The design of a robotic dexterous hand is essentially an engineered reproduction and optimization of the human finger structure. A human hand has 27 bones, 27 joints, 34 muscles, and more than 100 ligaments and tendons. Its structure balances three core advantages. These are motion freedom, force transfer efficiency, and sensing sensitivity.
As shown in Figure 1, human finger joints consist of DIP, PIP, MCP, IP, and CMC joints.
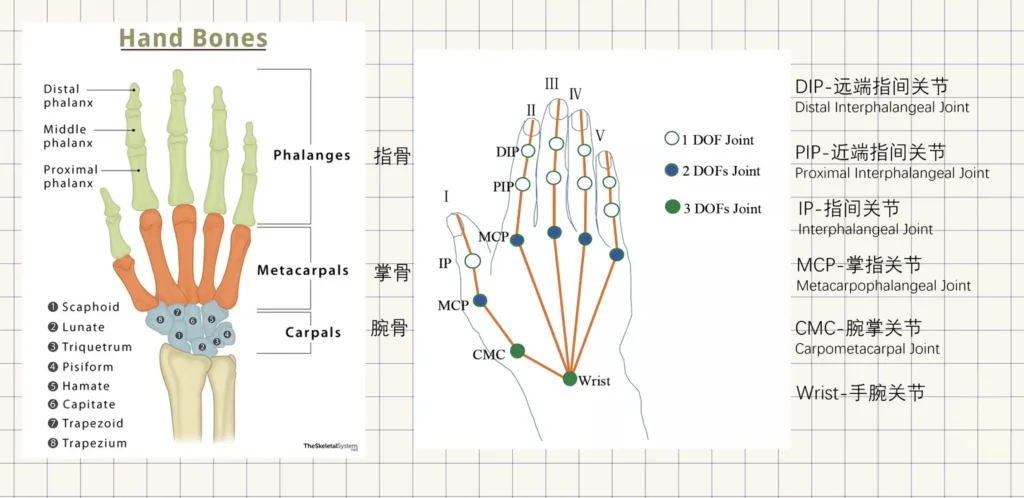
You can look at your own hand and compare each finger joint in the table below. The position of each part in the hand is shown in Table 1.
Table 1 : Human Finger Joint Classification and Motions
| Abbr. | English Term | Position | Common Motion |
| DIP | Distal Interphalangeal Joint | Between the middle phalanx and distal phalanx | Flexion / extension |
| PIP | Proximal Interphalangeal Joint | Between the proximal phalanx and middle phalanx | Flexion / extension |
| MCP | Metacarpophalangeal Joint | Between the metacarpal and proximal phalanx | Flexion / extension; abduction / adduction |
| CMC | Carpometacarpal Joint | Between the metacarpal and carpal bones. Especially important for the thumb. | Thumb opposition, abduction, adduction, rotation, etc. |
| IP | Interphalangeal Joint | The thumb has only one IP joint. | Flexion / extension |
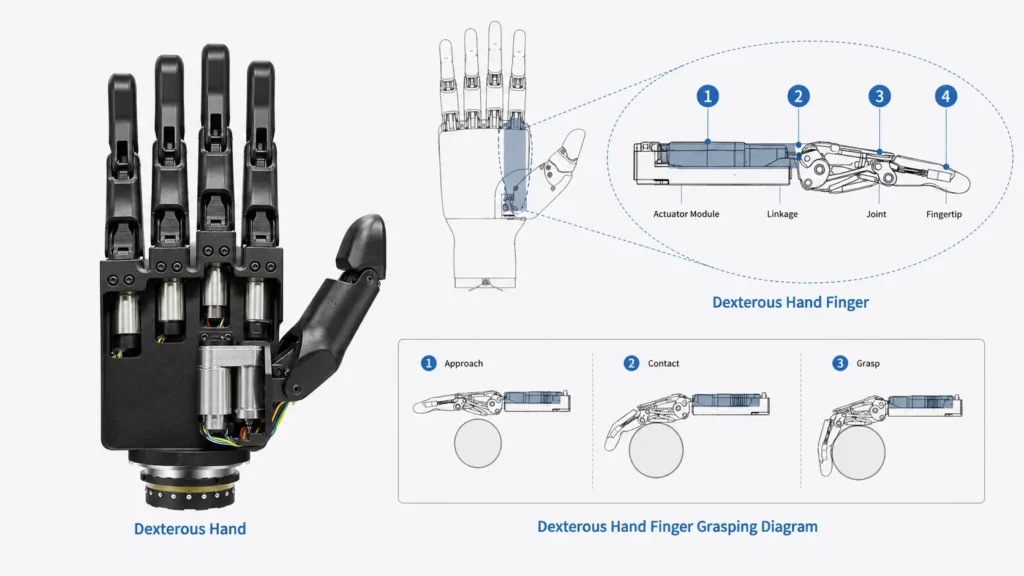
In robot design, engineers do not always copy human anatomy completely. They abstract it according to task needs.
For example, some dexterous hands keep the MCP, PIP, and DIP structure for each finger. Some omit active DIP driving. In that case, the DIP joint passively follows the PIP joint through a linkage or cable.
Some underactuated hands use one cable or one motor to drive several joints at the same time. This makes the structure simpler. It also improves adaptive grasping.
Degrees of Freedom, Active Degrees of Freedom, and Passive Degrees of Freedom
Degrees of freedom (DOF) are a core measure of a dexterous hand’s motion capability. They refer to the number of independent motions a rigid body can have. The number of joints is not equal to the number of DOF. If the PIP and DIP are forced to couple through a four-bar mechanism, two joints may move. But they may have only one independent motion variable.
Degrees of Freedom
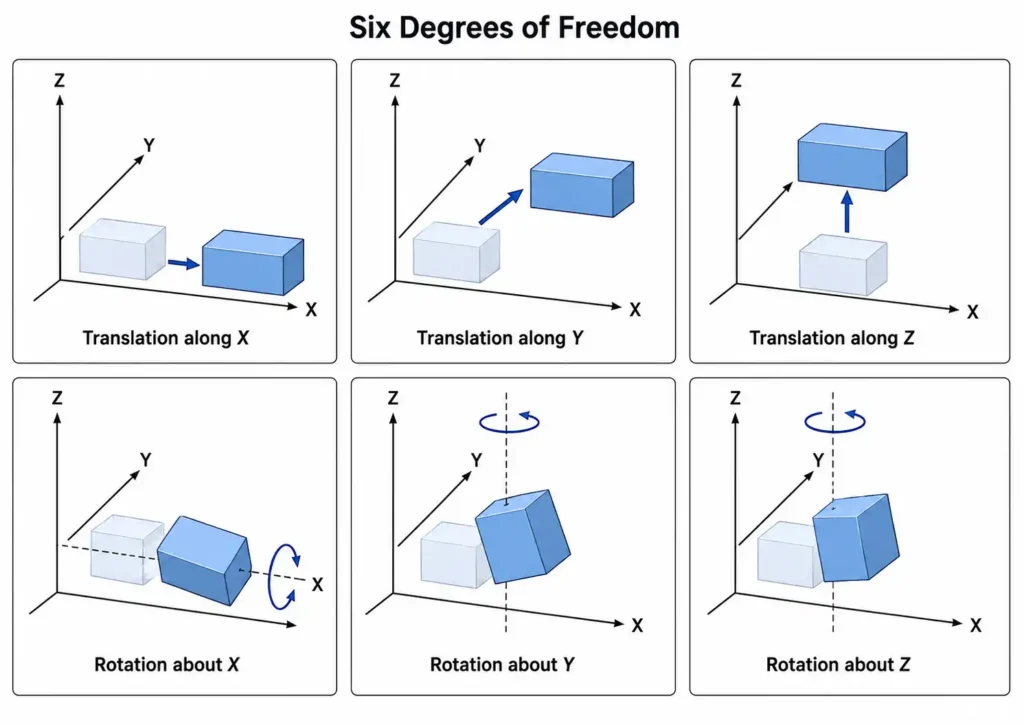
An unconstrained object in three-dimensional space has 6 degrees of freedom. They are translation along the X, Y, and Z axes, and rotation around the X, Y, and Z axes. This is shown in Figure 2.
Active Degrees of Freedom
Active DOF are motion DOF directly controlled by actuators such as motors, hydraulic cylinders, or pneumatic cylinders. Each independent actuator corresponds to one controllable and plannable joint dimension. This is a widely accepted basic logic in R&D. Active DOF determine the motions that a dexterous hand can actively control. They are the basis for fine manipulation.
Passive Degrees of Freedom
Passive DOF are not directly controlled by an independent motor. They can move under external force, springs, flexible structures, linkage coupling, or cable tension.
Fully Actuated and Underactuated
According to the relationship between the number of DOF and the number of driving sources, dexterous hands can be divided into two main types:
Fully actuated: The number of driving sources equals the number of controlled DOF. Each finger joint has an independent actuator. This provides very high motion precision. But the structure is complex. The volume is large. The cost is high. It is mostly used in research or high-end industrial scenarios.
Underactuated: The number of controlled DOF is greater than the number of driving sources. The parts without driving sources are coupled and follow the motion. Springs, tendon cables, and other elastic elements enable adaptive grasping. This balances flexibility and cost. It is currently the mainstream choice for commercialization.
| Type | Meaning | Advantages | Disadvantages |
| Total DOF | Independent or semi-independent motion dimensions of the hand | Describes dexterity | Statistical definitions are easy to confuse |
| Active DOF | DOF that can be independently controlled by actuators | Fine control. Rich motion. | More motors. Higher cost. Larger volume. |
| Passive DOF | No independent actuator. Driven by a mechanism or external force. | Lightweight. Compliant. Adaptive. | Weak precise control. |
| Underactuated | The number of actuators is lower than the number of joint motions. | Robust grasping. Simplified structure. | Difficult to achieve complex in-hand manipulation. |
Drive System: Classification of Motor Actuators
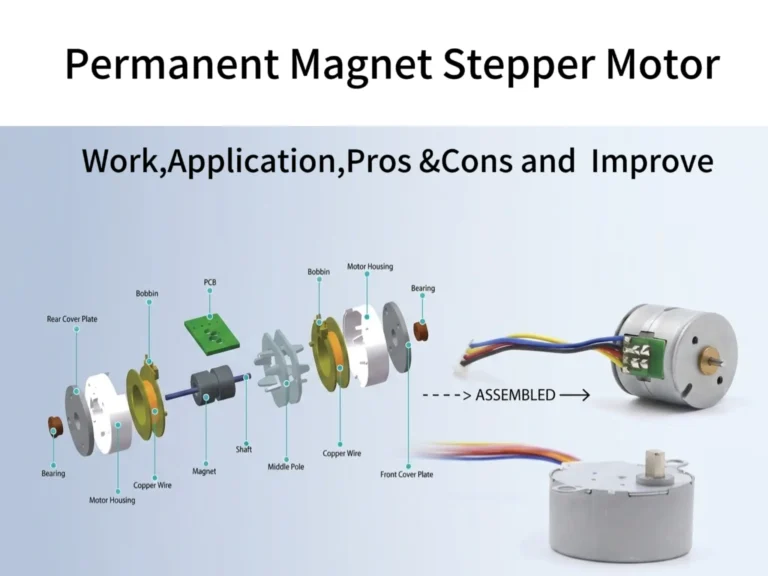
The drive system is the “muscle” of a dexterous hand. Most current market solutions use electric motor drives. The main motor actuators used in dexterous hands include servos, coreless geared motors, and finger joint modules.
Servo Scheme
A servo is a highly integrated small drive unit. It usually includes a motor, reduction gears, a position sensor, and a control circuit. Its advantages are simple use and mature control interfaces. It is suitable for teaching, prototype validation, low-cost robotic hands, and lightweight grasping tasks.
Advantages:
- High integration. Easy to use. No extra drive circuit is needed.
- High position control accuracy. Built-in position feedback.
- Relatively low cost. Mature supply chain.
Disadvantages:
- Low speed and low load capacity. The maximum single-finger thumb load is about 500 g.
- High noise and serious heating.
- Large size. It is hard to miniaturize the fingers.
- Short service life. Not suitable for long-term high-frequency operation.
When servos are used in a dexterous hand, they are often placed in the palm or on the back of the hand. Then linkages, gears, or cables drive the fingers. If servos are placed directly on each phalanx, the structure becomes easy to understand. But finger weight and volume increase quickly. This scheme is used in early research dexterous hands and low-cost consumer products.
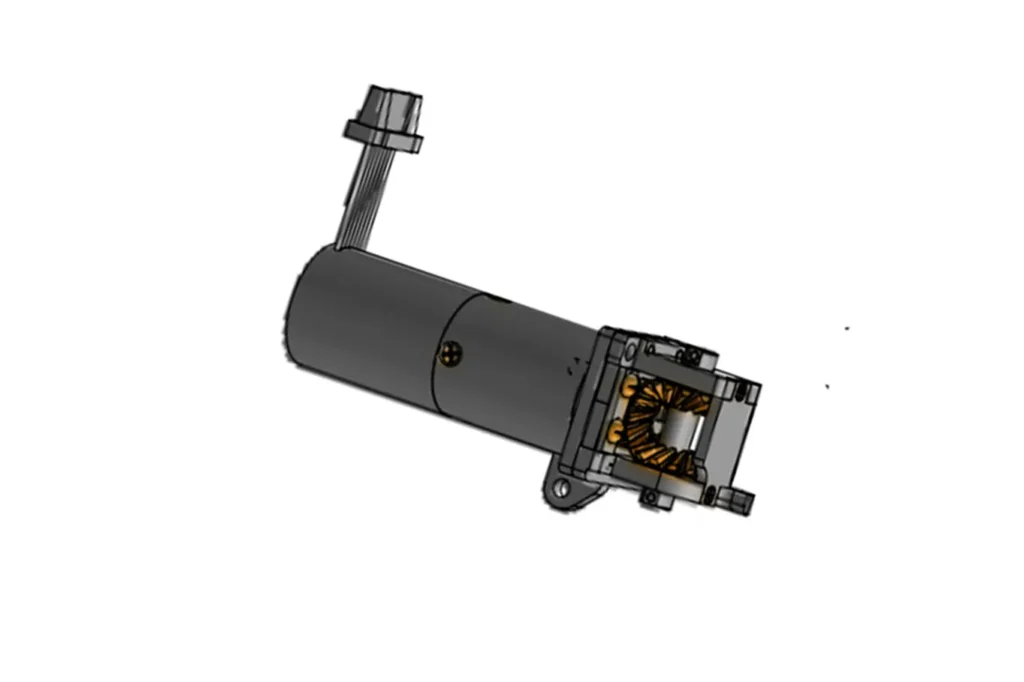
Coreless Motor Scheme
A coreless motor is a small motor with high power density and low rotational inertia. It is often used with a planetary gearbox, an encoder, and a motor driver board. It is very suitable for dexterous hands. Finger space is limited. The motor diameter, length, weight, and response speed are all important.




Advantages:
- Weight and rotational inertia are greatly reduced. Energy density is high.
- Fast response. Good control performance.
- Smooth operation. Low noise.
- High efficiency. Good energy-saving performance.
Disadvantages:
- High cost. Current supply mainly depends on international manufacturers.
- Relatively low torque. A reducer is usually needed.
- Complex manufacturing process. High requirements for materials and machining accuracy.
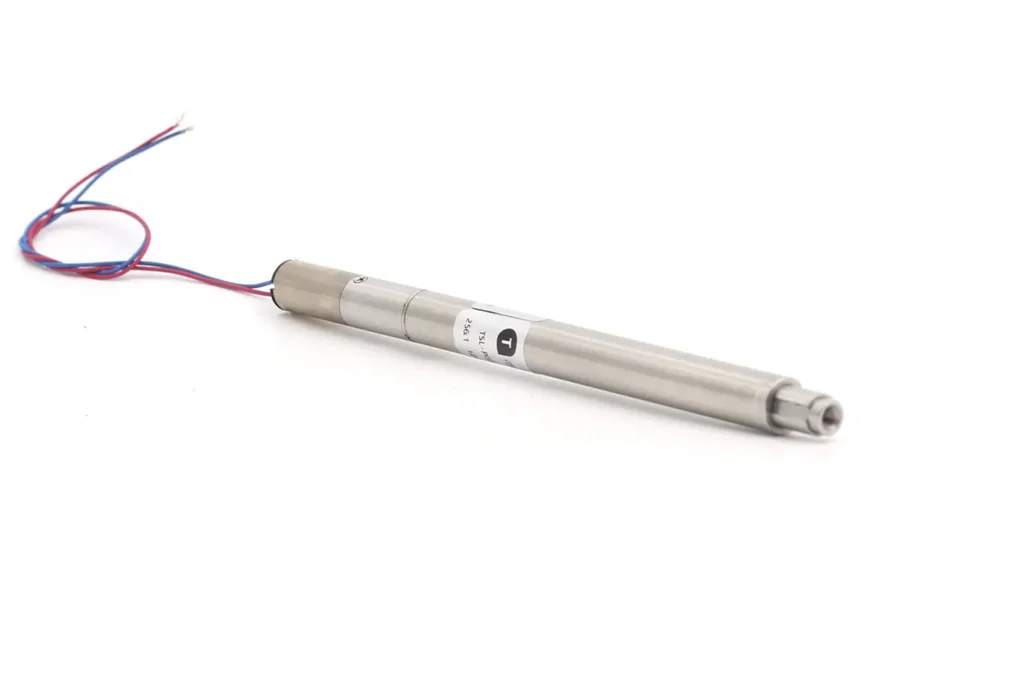
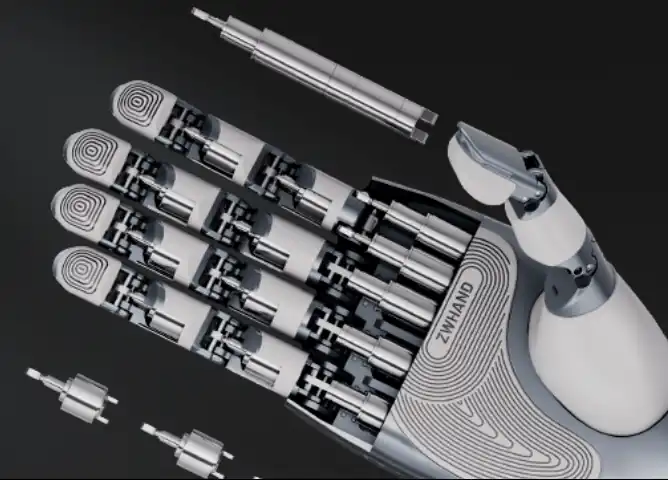
Finger Joint Module
A finger joint module can be understood as an integrated drive unit designed specifically for dexterous hands. It usually integrates a motor, reducer, position sensor, driver, and control interface. Some modules also integrate force sensing, elastic elements, or a screw mechanism.
Its design goal is to compress separate motors, reducers, sensors, and driver boards into standardized small modules. This improves assembly efficiency and system reliability.
Advantages:
- Highly integrated and compact. It fits the narrow installation space of a dexterous hand well.
- High positioning accuracy. It can reach 0.01 mm or even micron-level precision.
- Smooth operation with no jitter. Good force control performance.
- Modular design. Easy to install and maintain.
Disadvantages:
- High cost.
- Heat dissipation needs special attention.
- Very high requirements for manufacturing processes.
Dexterous Hand Transmission Methods
From the perspective of transmission mechanisms, mainstream dexterous hand solutions can be divided into three types. They are direct drive, linkage drive, and cable drive.
Direct Drive
Direct drive means that the motor is installed near the joint. It drives joint rotation directly or through a short gear set.
Its advantages are an intuitive structure, a short transmission chain, and a clear control relationship. It is easy to map joint angle to motor angle.
Its disadvantage is that placing motors on the fingers increases phalanx weight and inertia. It makes the fingers thicker and heavier. It also increases wiring and heat dissipation difficulty.
Direct drive is suitable for dexterous hands or robotic grippers with a moderate number of DOF. It is also suitable when high control accuracy is required and space is available.
Linkage Drive
Linkage drive transfers motor motion to finger joints through four-bar linkages, parallel linkages, differential mechanisms, or compound linkages. Its advantages are good rigidity, clear transmission, and strong impact resistance. It also makes mechanical coupling between the PIP and DIP easy.
For example, one motor can drive the PIP joint. At the same time, a four-bar linkage can make the DIP joint follow at a fixed ratio. This reduces the number of motors. It also keeps a bending path similar to that of the human hand.
| Advantages | Disadvantages |
| Good rigidity | Complex mechanism design |
| Reliable transmission | Takes up space |
| Relatively easy maintenance | Difficult to route through complex 3D paths |
| Suitable for joint coupling | Less flexible than cable drive |
Linkage drive is suitable for dexterous hands that value reliability, structural strength, and maintainability. Related studies also point out that linkages are robust, easy to manufacture, and easy to maintain. But it is not easy to achieve multi-DOF motion in the narrow space of a finger.
Cable Drive / Tendon Drive
Cable drive is also called tendon drive. It is a very common scheme in dexterous hands. It uses ropes, steel wires, Kevlar lines, fishing lines, or flexible tendons to simulate the tendons of the human hand. The motors are placed in the palm or forearm. Then cables transmit force to the finger joints.
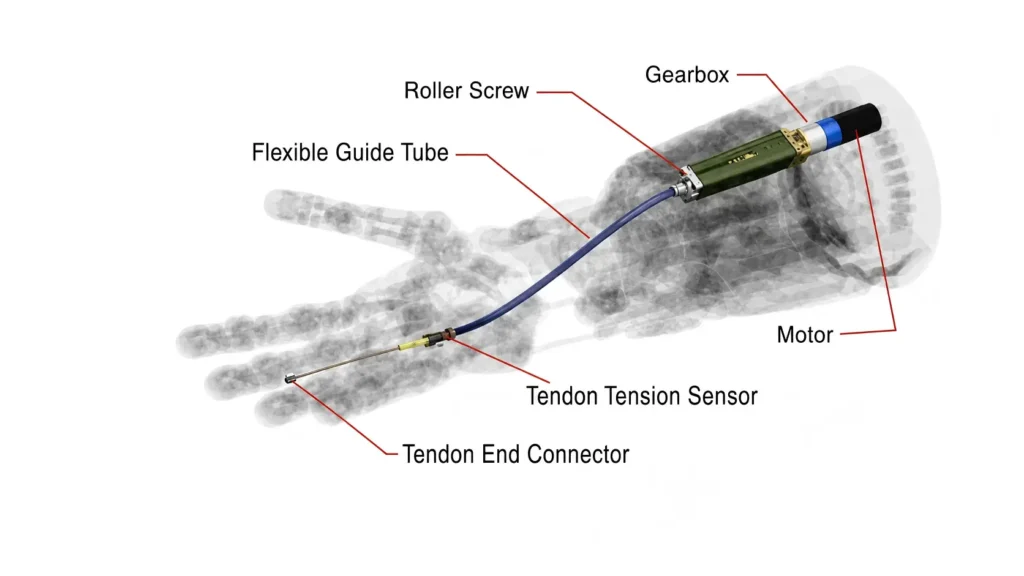
The biggest advantage of cable drive is that motors can be moved away from the fingers. This reduces finger weight and size. It also enables compliant force transmission similar to human tendons. The Shadow Dexterous Hand is a typical tendon-driven dexterous hand.
But cable drive also has clear disadvantages. Cables cause friction, elastic elongation, hysteresis, and slack. The system needs a tensioning mechanism. If antagonistic cable drive is used, the preload between the two cables must also be controlled.
A related paper in Nature Communications also notes that tendon-driven structures are close to the human hand’s driving method. But they bring engineering problems in assembly, maintenance, friction, and tensioning.
Cable drive is very suitable for humanoid dexterous hands, prosthetic hands, and high-DOF robotic hands. But it requires demanding mechanism design and control algorithms.
Horizontal Comparison of the Three Transmission Methods
| Item | Direct drive | Linkage drive | Cable drive | Hybrid drive |
| Motor Position | Near the joint | Palm or near the joint | Palm or forearm | Multiple positions |
| Control Difficulty | Low to medium | Medium | High | High |
| Structural Compactness | Medium | Medium | High | Medium to high |
| Output Rigidity | High | High | Medium | Medium to high |
| Compliance | Low to medium | Medium | High | Medium to high |
| Typical Applications | Modular robotic hands; precision joints | Engineered dexterous hands; reliable grasping | Humanoid dexterous hands; prosthetic hands; research platforms | High-performance humanoid robot hands |
In practice, many excellent dexterous hands do not use a single scheme. They use a hybrid scheme. For example, MCP abduction and adduction can be controlled by a linkage or an independent small motor. PIP and DIP can be coupled by cable drive or a four-bar linkage. The thumb may use an independent module to ensure opposition ability.
Summary and Outlook
Dexterous hand technology is developing rapidly. Different joint designs, drive systems, and transmission methods each have advantages and disadvantages. They suit different application scenarios.
With advantages in light weight and high flexibility, cable drive is still the mainstream choice for most dexterous hands. But problems such as cable wear and tension drift must be solved.
Linkage drive has irreplaceable advantages in industrial scenarios. Its high load capacity and high reliability make it the preferred choice for industrial grasping.
Direct drive is an emerging technology. It represents a future direction for dexterous hands. As high-torque-density motor technology continues to improve, direct-drive dexterous hands will play an increasingly important role in fine manipulation.
In the future, dexterous hand technology will move toward higher integration, better force control, lower cost, and longer service life.
At the same time, deep integration of multimodal perception and artificial intelligence will give dexterous hands stronger autonomous learning and environmental adaptation. This will truly realize “hand-brain coordination.” It will lay a solid foundation for humanoid robots to enter ordinary households.
Dexterous Hand Drive Module
As a dedicated manufacturer of high-performance robotic components, we deliver advanced Dexterous Hand Drive Modules engineered for the next generation of humanoid robots and bionic hands. All our specifications are backed by rigorous, real-world laboratory measurements—ensuring reliable torque, precision, and longevity in demanding applications.
Whether your robotic hand design utilizes direct-drive (DD), linkage mechanisms, or cable-driven (tendon-driven) systems, our modular platform offers the exact actuation solution you need.