A brushless planetary gear motor is a drive product that combines a brushless DC motor with a planetary gearbox.
A brushless motor normally runs at high speed. The planetary gearbox reduces the output speed and increases the output torque. Together, they provide stable power in a compact installation space. They are widely used in robots, medical equipment, automation systems, smart locks, precision instruments, and other products.
When selecting a brushless planetary gear motor, purchasing teams and R&D engineers should not consider only voltage and gear ratio. They should also consider output speed, torque, dimensions, operating time, gearbox backlash, control method, and service life.
What Is a Brushless Planetary Gear Motor?
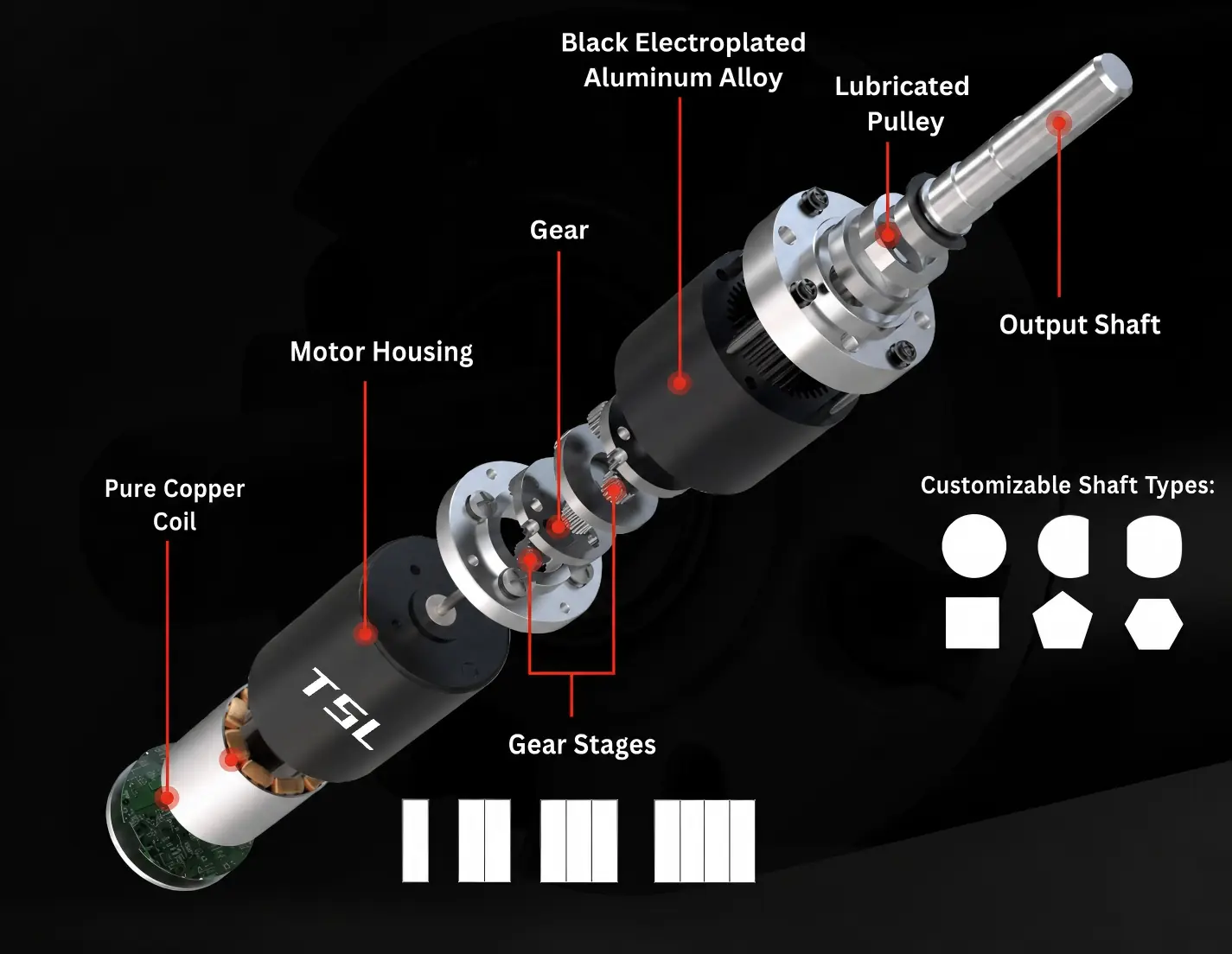
A brushless planetary gear motor normally consists of two main parts:
2. Planetary reduction gearbox
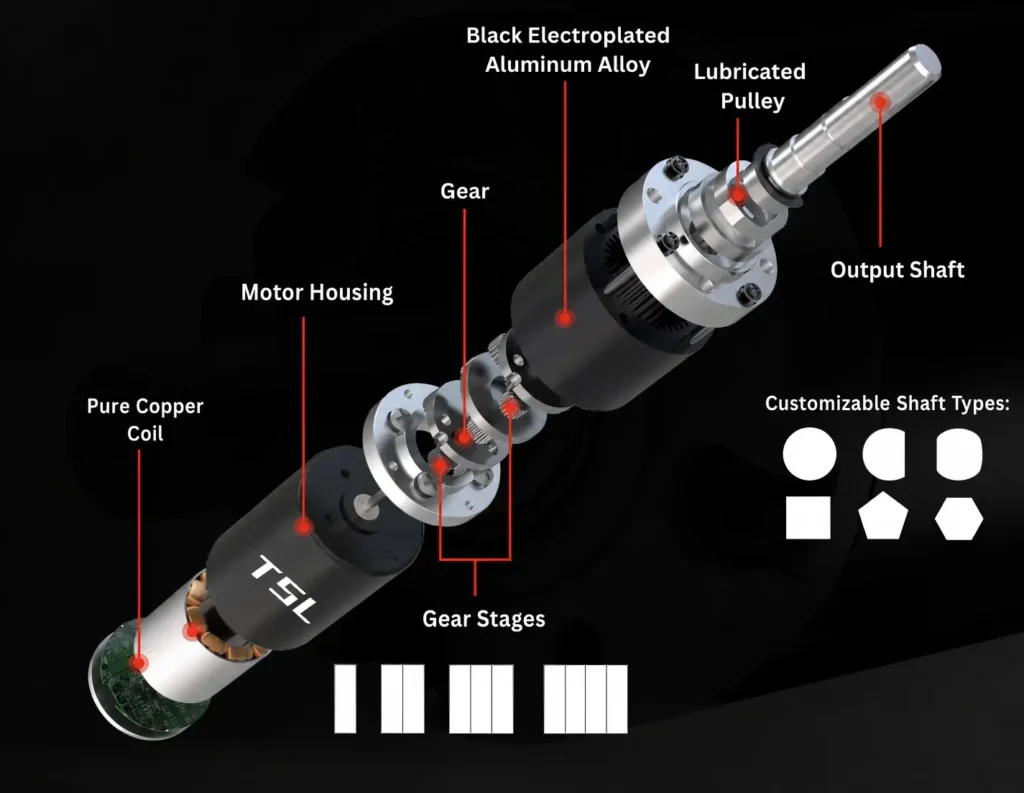
The brushless DC motor provides high-speed rotation. The planetary gearbox reduces the speed and converts the motor output into higher output torque.
A planetary gearbox normally includes a sun gear, planet gears, a ring gear, and a planet carrier. Several planet gears rotate around the sun gear and mesh with the ring gear at the same time.
Compared with a conventional single-stage gear structure, a planetary gearbox shares the load across several gears. It can therefore usually handle more torque at the same or a similar outer diameter.
Why Choose a Brushless Motor?
A conventional brushed DC motor uses carbon brushes and a commutator to switch current. The brushes wear gradually during operation. Service life and maintenance must therefore be considered.

A brushless DC motor uses electronic commutation and has no mechanical carbon brushes. Compared with a brushed motor, it normally performs better in long-term operation, frequent start-stop cycles, and speed control.
A brushless motor is suitable for the following operating conditions:
- Long operating time
- Frequent starts and stops
- Long service-life requirement
- Difficult maintenance after installation
- Speed adjustment or speed feedback required
- Specific operating-noise requirement
- Forward and reverse control required
A brushless motor normally requires a compatible brushless motor driver.
Depending on the control requirements, the system can use Hall sensors, sensorless control, or encoder feedback.
What Are the Advantages of a Planetary Gearbox?
The planetary gearbox is a key part of a brushless planetary gear motor. It directly affects output torque, speed, backlash, noise, and service life.

Compact Size and Relatively High Torque
Several planet gears transmit power at the same time and share the load.
When installation space is limited, a planetary reduction structure can normally provide more output torque than a conventional spur gear structure.
Coaxial Input and Output Shafts
In most planetary gearboxes, the input shaft and output shaft are on the same centreline.
This structure is easy to install. It is especially suitable for cylindrical spaces, mechanical joints, and narrow assemblies.
Wide Range of Gear Ratios
A planetary gearbox can use different numbers of stages to achieve different gear ratios.
A higher gear ratio normally reduces output speed and increases output torque. However, more reduction stages may also increase the length, reduce efficiency, and increase backlash.
Stable Transmission
Several planet gears mesh at the same time. This distributes the load more evenly.
With suitable structural design and machining accuracy, a planetary gear motor can provide stable power output.
Backlash Can Be Controlled to Meet Requirements
Different applications have different backlash requirements.
Standard-backlash gearboxes can be used in general transmission equipment. Robot joints, precision positioning mechanisms, and automation equipment normally require lower backlash.
Brushless Planetary Gear Motor vs. Other Gear Motors
Different gear motors have different structural characteristics. Selection should compare the mounting direction, output torque, control requirements, cost, and service life.
| Gear Motor Type | Main Features | Points to Consider | Common Applications |
| Brushless Planetary Gear Motor | Compact size, high torque, long service life | Requires a brushless driver | Robots, medical equipment, automation equipment |
| Brushed Planetary Gear Motor | Simple control and relatively low cost | Carbon brushes wear gradually | Consumer products and short-duty equipment |
| Brushless Spur Gear Motor | Simple structure and flexible gear-ratio options | May be larger at the same torque | Office equipment and vending equipment |
| Brushless Worm Gear Motor | Provides right-angle output | Normally less efficient than a planetary gearbox | Valves, locks, and adjustment mechanisms |
| Stepper Planetary Gear Motor | Convenient position control | High-speed performance and smooth operation must be considered | Positioning stages and dispensing equipment |
When a product requires compact size, high torque, speed control, and long service life, a brushless planetary gear motor is normally a suitable choice.
How Small Can a Brushless Planetary Gear Motor Be?
Motor size is often a critical design factor in medical devices, miniature robots, dexterous hands, laboratory equipment, and portable products.
TSL MOTOR offers a range of miniature brushless gear motor solutions. The smallest brushless coreless gear motor can have a diameter of only 8 mm.

This type of product normally combines a brushless coreless motor with a miniature planetary gearbox.
The following options can also be added according to customer requirements:
- Hall sensors
- Magnetic or optical encoder
- Integrated driver
- Custom output shaft
- Lead screw structure
- Custom connector
- Custom wire length
- Special gear ratio
- Required IP protection rating
An 8 mm brushless coreless gear motor is suitable for products with very limited installation space and specific requirements for weight, response speed, and control performance.
A coreless motor has no conventional iron-core structure. Its rotor inertia is low, so it normally responds faster during starting, stopping, and reversing.
Common Applications of a Brushless Planetary Gear Motor
Robots and Dexterous Hands
Robot joints, grippers, manipulators, and dexterous hands normally require a compact and lightweight drive with sufficient output torque.
A brushless planetary gear motor increases torque through the planetary gearbox. An encoder can provide speed or position feedback.
Medical Equipment
Medical equipment often has specific requirements for motor size, noise, stability, and service life.
- Common applications include:
- Surgical instruments
- Rehabilitation equipment
- Infusion equipment
- Laboratory analysers
- Small pumps and valves
Medical Robots
When selecting a motor for medical equipment, temperature rise, noise, materials, operating environment, and service life should also be considered carefully.
Automation Equipment
In automation equipment, a brushless planetary gear motor can be used for:
- Electric grippers
- Small conveyor mechanisms
- Positioning mechanisms
- Valve actuators
- Automatic adjustment mechanisms
- Small pumps
- Robotic end effectors
For precise control, an encoder and a closed-loop driver can be added.
Smart Locks and Door-Control Equipment
Smart door locks, cabinet locks, and door-control equipment normally require a compact installation size and sufficient starting torque.
Friction inside the lock body may vary. A suitable torque margin should therefore be reserved during selection.
Pumps and Fluid-Control Equipment
Miniature pumps, metering pumps, and valve actuators require stable speed and reliable starting performance.
A suitable gear ratio can adjust the motor output speed to match the requirements of the pump or valve mechanism.
Optical Equipment and Laboratory Instruments
Microscopes, spectrometers, pipetting equipment, and sample-handling equipment normally require smooth and repeatable motion.
A brushless coreless motor combined with a planetary gearbox and encoder can drive these precision motion mechanisms.
How to Select a Brushless Planetary Gear Motor
When selecting a brushless planetary gear motor, start with the load and actual operating conditions. Do not begin by choosing a motor model directly.
Determine the Output Torque
First, calculate the torque required during normal equipment operation.
In addition to the rated operating torque, consider:
- Starting torque
- Acceleration torque
- Instantaneous peak torque
- Friction resistance
- Load during jamming or stalling
- Torque caused by external impact
Do not select the motor based only on stall torque.
For long-term operation, the motor should run within its rated operating range with a suitable safety margin.
Determine the Output Speed
The relationship between motor speed and gear ratio can be estimated with the following formula:
Output speed = Motor speed ÷ Gear ratio
For example, if the motor speed is 10,000 rpm and the gearbox ratio is 100:1, the output speed is approximately 100 rpm.
Select a Suitable Gear Ratio
A higher gear ratio normally reduces speed and increases torque.
However, a higher gear ratio is not always better.
An excessively high gear ratio may cause the following problems:
- Longer gearbox
- More reduction stages
- Lower transmission efficiency
- More backlash
- Output speed that is too low
- Higher cost
A practical approach is to run the motor at a suitable operating speed and use the gearbox to achieve the required output speed.
Confirm the Operating Voltage and Driver
Common voltage options include:
- 6 V
- 12 V
- 24 V
- Other custom voltages
The brushless driver must match the motor voltage, current, Hall configuration, and control method.
Confirm the following during selection:
- Supply voltage
- Maximum operating current
- Forward and reverse control
- PWM speed control
- Hall signals
- Encoder interface
- Speed-control or position-control method
Confirm the Installation Dimensions
Confirm the following dimensions in advance:
- Motor outer diameter
- Gearbox outer diameter
- Overall length
- Output shaft diameter
- Output shaft length
- Mounting-hole positions
- Connector dimensions
- Wire outlet direction
For miniature equipment, a difference of only a few millimetres may affect the final installation.
Confirm the Operating Time and Duty Cycle
Different duty cycles have a major effect on motor temperature rise and service life.
For example, a motor that runs for only 5 seconds per minute has very different power and heat-dissipation requirements from a motor that runs continuously.
Provide the following information to the supplier:
- Running time per cycle
- Stop time per cycle
- Number of starts and stops per hour
- Whether continuous operation is required
- Ambient operating temperature
- Load variation
- Expected service life
Confirm Backlash and Positioning Accuracy
For pumps, fans, or general transmission mechanisms, the backlash requirement is normally not very strict.
For robot joints, positioning stages, or precision actuators, confirm:
- Maximum allowable backlash
- Repeat positioning accuracy
- Encoder resolution
- Forward and reverse switching frequency
- Whether closed-loop control is required
An encoder can measure motor position or speed. However, it cannot directly eliminate mechanical backlash inside the gearbox.
For systems with high positioning-accuracy requirements, both the gearbox structure and control compensation should be considered.
Confirm the Noise Requirements
Motor noise depends on the motor structure and the following factors:
- Gear material
- Gear machining accuracy
- Number of reduction stages
- Motor speed
- Output load
- Bearing structure
- Lubricating grease
- Housing resonance
- Mounting method
If the project has a clear noise limit, provide the actual operating speed, load, and mounting method for a targeted evaluation.
What Information Is Required When Requesting a Brushless Planetary Gear Motor Quote?
To receive a suitable motor recommendation more quickly, provide the following information with your enquiry:
- Product application
- Operating voltage
- Motor no-load speed
- Continuous operating torque
- Peak torque
- Maximum allowable diameter
- Maximum allowable length
- Duty cycle
- Output shaft dimensions
- Whether Hall sensors are required
- Whether an encoder is required
- Whether a driver is required
- * Wire length and connector requirements
- Sample quantity
- Estimated annual quantity
The more complete the information is, the easier it is for the supplier to determine whether the motor, gearbox, and driver are suitable for the application.
What Brushless Planetary Gear Motor Customisation Services Does TSL MOTOR Offer?
TSL MOTOR provides custom brushless planetary gear motor solutions based on the customer’s product structure and operating requirements.
Customisable items include:
- Motor diameter
- Motor length
- Operating voltage
- Motor winding
- Gear ratio
- Output speed
- Output torque
- Gear material
- Output shaft dimensions
- Output shaft shape
- Bearing structure
- Lubrication method
- Hall configuration
- * Encoder type
- Encoder resolution
- Integrated driver
- Wire length
- Connector
- Backlash
- Noise
- Service life
For products with limited installation space, we can also provide brushless coreless gear motor solutions with diameters as small as 8 mm.
After sample testing, the speed, torque, gear ratio, output shaft, and feedback system can be adjusted further.
Summary
A brushless planetary gear motor is suitable for products that require compact size, high torque, adjustable speed, and long service life.
Motor selection should not consider only voltage, speed, or gear ratio. Output torque, duty cycle, temperature rise, backlash, driver, installation space, and service life should also be evaluated.
For robots, medical equipment, precision instruments, and compact automation equipment, a miniature brushless planetary gear motor can provide stable power in a limited space.
TSL MOTOR offers a wide range of custom brushless planetary gear motor and brushless coreless gear motor solutions. The smallest brushless coreless gear motor can have a diameter of only 8 mm.
For product selection, provide the voltage, speed, torque, dimensions, and application details. This helps us recommend a more suitable motor solution.

Brushless Gear Motor
A brushless gear motor is an excellent choice for devices that require long-lasting performance. These motors, paired with spur, planetary, or worm gearboxes, are offered by leading manufacturers of miniature geared motors. Known as brushless gear motors, they provide a longer lifespan and lower maintenance costs due to the lack of brushes in the DC motor.