In precision automation, medical devices, robotic grippers, optical adjustment, micro valves, and portable equipment, more and more mechanisms need to complete pushing, pulling, lifting, clamping, or positioning in a very limited space.
Compared with pneumatic and hydraulic solutions, a micro electric actuator is easier to miniaturize. It has lower noise. It has controllable stroke. It can provide position feedback. It is also easier to integrate into battery-powered systems.
From the structural point of view, the core of a micro electric actuator usually includes a coreless motor, a reduction mechanism, a screw pair, a guide structure, position feedback, and housing components.
The screw pair directly determines the thrust, speed, efficiency, service life, noise, cost, and self-locking performance of the actuator. According to the screw structure, common micro electric actuator solutions can be divided into three types: T-type lead screw micro electric actuator, ball screw micro electric actuator, and planetary roller screw micro electric actuator.
Key Takeaways
- A micro electric actuator provides compact and precise linear motion.
- A coreless motor improves response speed and motion smoothness.
- A T-type lead screw offers simple structure and low cost.
- A ball screw provides high efficiency and precise positioning.
- A planetary roller screw delivers high thrust in a compact size.
- Each screw type suits different speed, load, and cost needs.
- The screw structure determines actuator performance and application range.
Why do micro electric actuators often use coreless motors?
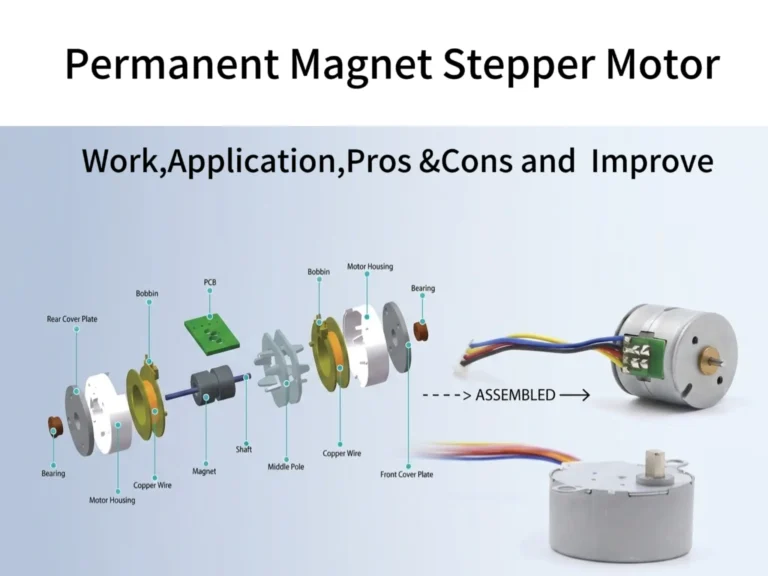
A coreless dc motor is also called an ironless motor. Its structure completely breaks through the traditional armature and rotor layout of a dc motor. The rotor uses a self-supporting skew-wound winding process.
The coil is shaped like a hollow cup. It has no iron core support structure. The stator is formed by an internal stationary permanent magnet system and an outer magnetic yoke.
In its DC motor technology description, maxon states that low mass inertia helps achieve high acceleration. It also provides no magnetic cogging, low inductance, and high efficiency. FAULHABER also states that its ironless self-supporting coil design can reduce rotor inertia. It also brings high dynamic performance and smooth operation without cogging.
For micro actuators, the main advantages of coreless motors are shown below.
| Feature | Value for micro electric actuator |
| Low rotor inertia | Low rotor inertia |
| No cogging effect | No cogging effect |
| Small size and light weight | Small size and light weight |
| High efficiency | High efficiency |
| Good control linearity | Good control linearity |
Therefore, in micro grippers, medical pumps, optical adjustment modules, and micro lifting mechanisms, the combination of a coreless motor and a precision screw is a very typical micro electric actuator structure.
T-type lead screw micro electric actuator
A T-type lead screw is also called a trapezoidal lead screw or sliding screw. It transmits motion through sliding friction between the screw and the nut. Unlike a ball screw, there are no circulating balls inside a T-type lead screw.

Its structure is simple. Its manufacturing cost is low. Its resistance to contamination is good. It is a very common economical solution in micro electric actuators.
In Thomson’s comparison between lead screws and ball screws, a lead screw does not use ball bearings. It works through friction between sliding surfaces. Therefore, it has higher friction and lower efficiency than a ball screw.
Because of the higher friction, a T-type lead screw can provide a certain level of self-locking in many cases. After power is cut off, it is not easily back-driven by the load.
Advantages of T-type lead screw actuators
The biggest advantages of a T-type lead screw micro electric actuator are its simple structure, low cost, and compact assembly. It is suitable for medium-low speed applications. It is suitable for low-duty-cycle applications. It is also suitable for applications where thrust requirements are not extreme.
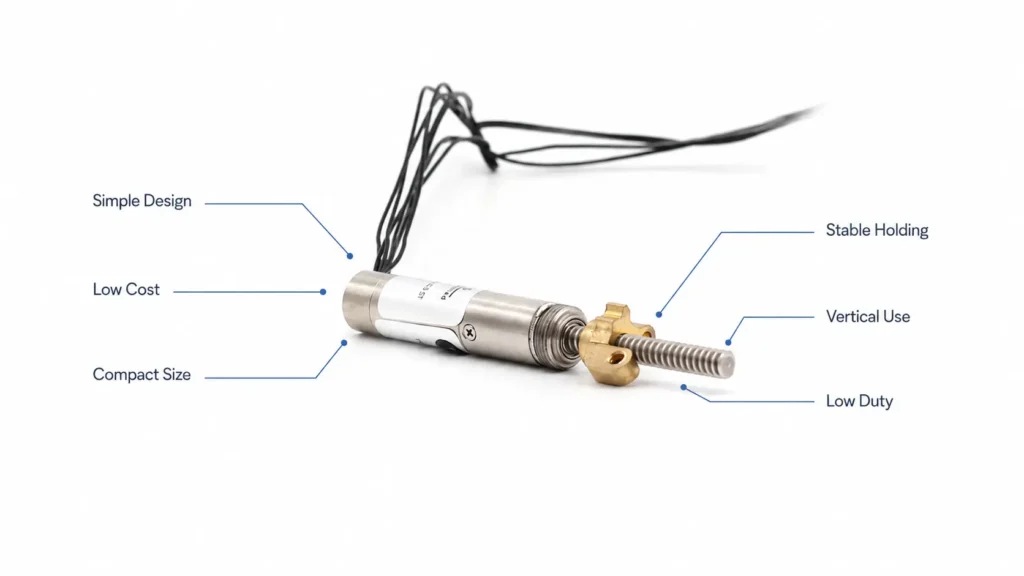
For vertical lifting, small valves, small locks, home appliance mechanisms, and low-cost automation modules that need to hold position after power loss, a T-type lead screw is often the preferred solution.
Limitations of T-type lead screw actuators
Because it uses sliding friction, the efficiency, heat generation, and wear performance of a T-type lead screw are usually not as good as those of a ball screw. According to TSL’s typical test data, the efficiency of a lead screw is usually about 30% to 70%. The efficiency of a ball screw is usually about 85% to 95%.
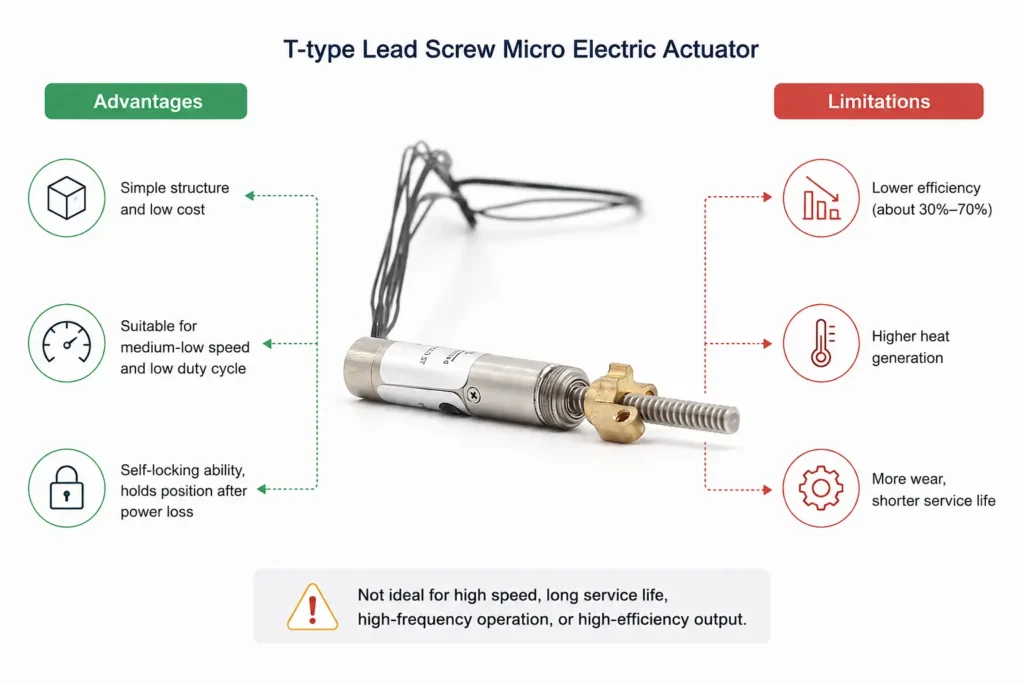
Therefore, if a micro electric actuator requires high speed, long service life, high-frequency operation, or high-efficiency output, a T-type lead screw is not the best choice.
Suitable applications for T-type lead screw actuators
T-type lead screw micro electric actuators are suitable for:
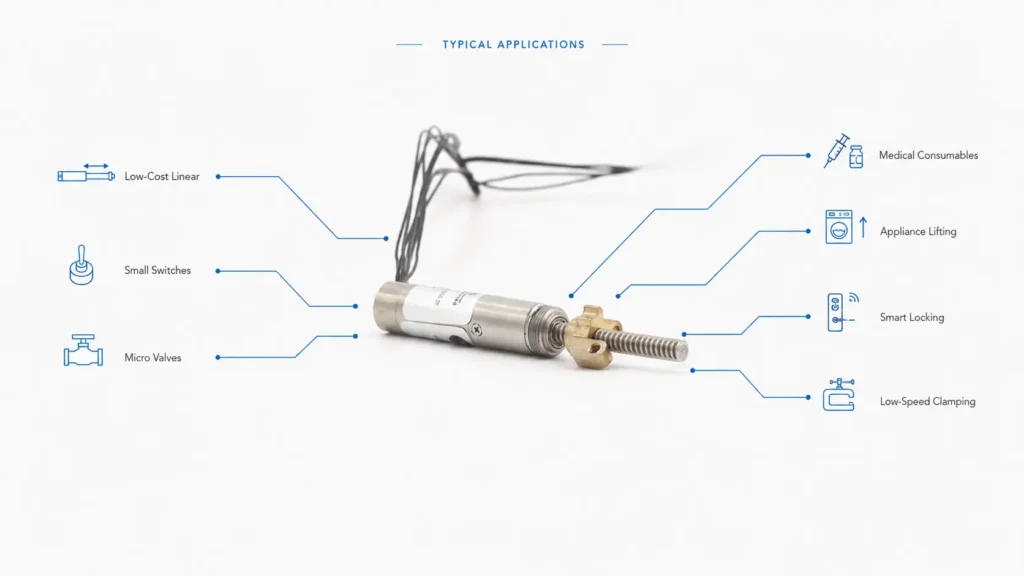
Low-cost linear actuators, small switching mechanisms, micro valves, medical consumable devices, home appliance lifting structures, smart locking mechanisms, and low-speed clamping mechanisms.
The combination of a T-type lead screw and a coreless motor is the most economical micro actuator solution. The high efficiency of the coreless motor can partly compensate for the low transmission efficiency of the T-type lead screw. Its smooth torque output can also reduce vibration and noise caused by sliding friction.
Ball screw micro electric actuator
The working principle of a ball screw is different from that of a T-type lead screw. A ball screw consists of a screw, a nut, and balls. The balls circulate and roll in the helical raceway between the screw and the nut.

This changes sliding friction into rolling friction. A ball screw uses circulating balls to reduce friction and improve efficiency. A lead screw transmits force through sliding surfaces.
For a micro electric actuator, a ball screw is very suitable for applications that require high efficiency, high repeat positioning accuracy, higher speed, and longer service life.
Advantages of ball screw actuators
A ball screw has low friction and high efficiency. With the same motor power, it can output higher effective thrust. It can also reduce motor current and temperature rise under the same thrust requirement. This is especially important for battery-powered devices.
At the same time, the ball screw has better positioning performance. It is suitable for use with a coreless motor, encoder, and closed-loop control system. It can achieve precise extension, micro feeding, and repeat positioning.
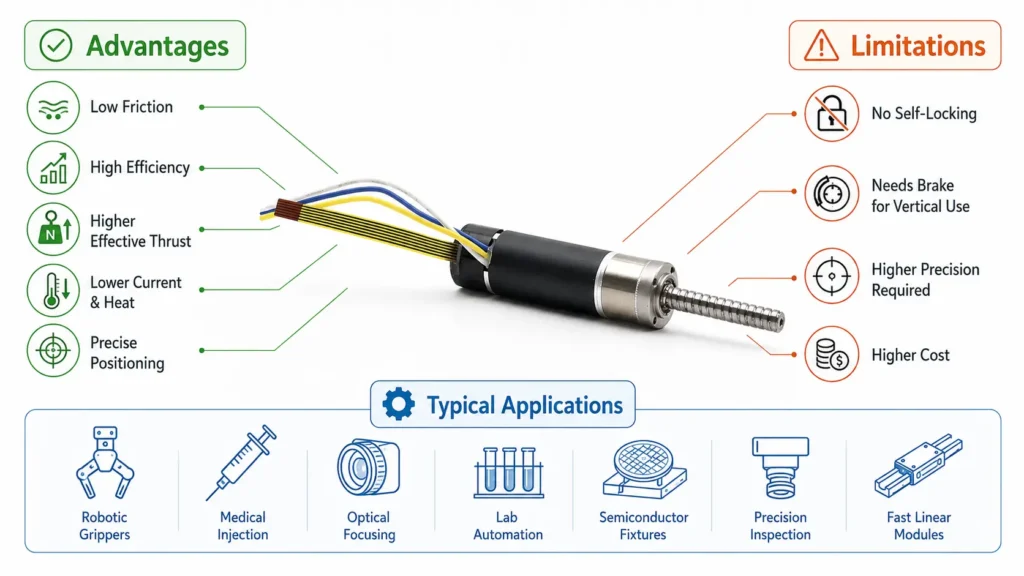
Limitations of ball screw actuators
Because a ball screw has high efficiency, it usually does not have self-locking capability. A circulating ball screw has low rolling friction. It is usually not a self-locking structure. Especially in vertical installation, a proper motor brake or holding mechanism is needed.
In addition, a ball screw has higher requirements for machining accuracy, lubrication, dust protection, and assembly coaxiality. Its cost is usually higher than that of a T-type lead screw.
Suitable applications
Ball screw micro electric actuators are suitable for:
Robotic grippers, medical injection and pumping mechanisms, optical focusing platforms, laboratory automation, small semiconductor fixtures, precision inspection equipment, and micro linear modules that require fast reciprocating motion.
The combination of a ball screw and a coreless motor is currently a mainstream solution for high-performance micro actuators. Both parts have high efficiency. After combination, the overall system efficiency can reach more than 80%.
Planetary roller screw micro electric actuator
The planetary roller screw has the highest performance among the three structures. It does not transmit force through balls. Instead, multiple threaded rollers roll and mesh between the screw and the nut. This spreads the load over more contact points.

Therefore, it can achieve higher thrust, higher rigidity, and longer service life in a relatively compact size.
Ewellix emphasizes that planetary roller screws have high force density, strong robustness, long service life, and impact load resistance. It positions them as a drive solution for high-duty-cycle applications. SKF also states that the threaded contact form of a planetary roller screw helps form a larger contact area. This provides high load capacity. It can also achieve precise pressure and speed control.
Advantages of planetary roller screw actuators
In a micro electric actuator, the greatest value of a planetary roller screw is high thrust density. When the device space is very small, but large axial force, high rigidity, and long service life are required, a planetary roller screw has more advantages than an ordinary ball screw.
It is suitable for high-frequency cycles, heavy-load pressing, precision clamping, micro servo presses, small aerospace mechanisms, and high-end robotic end effectors.
Limitations of planetary roller screw actuators
The structure of a planetary roller screw is complex. Its machining and assembly are difficult. Its cost is much higher than that of T-type lead screws and ball screws. For ordinary low-speed, light-load, and low-cost applications, using a planetary roller screw may lead to over-specification.
Suitable applications
Planetary roller screw micro electric actuators are suitable for:
High-thrust micro servo cylinders, precision pressing, high-load robotic grippers, aerospace micro actuators, high-end medical devices, and compact linear drive systems that require high rigidity and long service life.
The combination of a planetary roller screw and a coreless motor represents the highest performance level of micro electric actuators. The high power density of the coreless motor is combined with the high load density of the planetary roller screw. This achieves the ultimate performance of “small size and high thrust.”
Taking TSL SAG1565 as an example, a size of 45 × 65 mm can deliver 500 N of thrust.
Comparison of three typical micro electric actuator technical routes
| Parameter | Coreless Motor + T-type Lead Screw | Coreless Motor + Ball Screw | Coreless Motor + Planetary Roller Screw |
| Representative Brands/Products | TSL/MOONS' | TSL/Faulhaber | TSL / U-Screws |
| Core Structure | Coreless motor drives T-type lead screw to convert rotary motion into linear motion | Integrated coreless DC motor and precision ball screw | Coreless motor paired with high-load screw with multi-roller meshing |
| Key Advantages | Simple structure, low cost, and can have certain self-locking capability | High efficiency, smooth motion, suitable for precise positioning and high-frequency operation | High thrust density, high rigidity, long service life, suitable for high-load compact designs |
| Main Limitations | Relatively low transmission efficiency, significant wear during long-term high-speed operation | Generally no self-locking capability, higher cost than T-type lead screw | Complex structure, high processing difficulty, high cost |
| Suitable Applications | Small valves, home appliance mechanisms, low-speed push-pull, power-off holding scenarios | Medical equipment, optical adjustment, robot grippers, precision testing equipment | Micro servo cylinders, high-load grippers, aerospace mechanisms, high-end automation equipment |
From the parameter comparison, the T-type lead screw solution is more suitable for micro electric actuators that require low cost, low speed, and power-off holding.
The ball screw solution is more suitable for high efficiency, high precision, and high-frequency reciprocating motion. The planetary roller screw solution provides higher load capacity and longer service life in a compact size. It is suitable for high-end micro electric actuator systems.
Technical parameter comparison of different micro electric actuators
To analyze coreless motors and micro screw actuators more clearly, this section summarizes key parameters from major manufacturers such as TSL, Faulhaber, and U‑Screws.
By comparing these parameters side by side, the performance level of each actuator type becomes easier to understand.
TSL linear coreless motor series specifications
TSL linear coreless electric cylinders use their unique ironless winding. They provide integrated micro actuator designs, including brushless cogging-free series and brushed ironless series.
In terms of encoder and drive configuration, TSL micro electric actuators can be equipped with encoders and built-in drivers. They can also use an integrated encoder and driver solution.
Parameters and motion control can be completed through TSL’s self-developed upper computer software. The screw end can be equipped with a T-type lead screw, ball screw, or planetary roller screw. This meets different needs for thrust, speed, and positioning accuracy.
| Parameter | T-type Lead Screw | Ball Screw | Planetary Roller Screw |
| TSL Typical Representative Model | TSL-PG8K256-KS0816+SG35 | TSL-HP12X-1W2W6-24-4 | SAG-1565 |
| Specification | 8mm Diameter | 16mm Diameter | 45*65mm |
| Rated Voltage | 12V | 12V | 12V |
| Thrust | 30N | Customized according to customer requirements | 500N |
| Linear Speed | 2.5±10% mm/s | Customized according to customer requirements | ≥0.4mm/s |
| Encoder and Driver Configuration | Standard models have no encoder or driver configuration, customizable | Standard models are equipped with absolute encoders, drivers are customizable | Built-in linear Hall encoder + built-in driver, equipped with self-developed upper computer operation |
Faulhaber integrated ball screw motor specifications
The original German Faulhaber integrated 2642W024CRIE2-1024 + BS22-1.5 + BSA01 is a typical example of an integrated micro electric cylinder with rolling transmission. This product uses an integrated structure of a coreless DC permanent magnet motor and a precision ground ball screw.
It is suitable for micro electric actuator applications that require compact structure, smooth motion, and high position feedback accuracy.
| Parameter Category | Technical Specification |
| Representative Model | 2642W024CRIE2-1024 + BS22-1.5 + BSA01 |
| Motor Technical Base | 2642_CR Grade Coreless DC Permanent Magnet Motor |
| Screw Type | Precision Ground Ball Screw |
| Screw Model | BS22-1.5 |
| Screw Nominal Diameter | 22 mm |
| Thread Lead | 1.5 mm |
| Coupling Configuration | Zero Backlash Flexible Coupling |
| Motor Body Outer Diameter | 26 mm |
| Overall Assembly Length of the Assembly | 126.5 mm |
| Overall Weight | 0.412 lbs, approx. 187 g |
| Rated Coil Voltage | 24 V |
| Position Feedback Sensor | IE2 Series 2-Channel Magnetic Incremental Encoder |
| Encoder Resolution | 1024 CPR |
U-Screws inverted micro planetary roller screw MUSI performance parameters
The U-Screws inverted planetary roller screw MUSI is also called an Inverted Planetary Roller Screw. Its thread is machined on the inner wall of the nut. The nut rotates under the constraint of the outer cylinder. It then pushes the hollow screw shaft to make pure linear reciprocating motion.
This structure has high load density, high rigidity, and high transmission efficiency. It is suitable for high-thrust, long-life, and compact micro electric actuator designs.
| Parameter | MUSI 6 | MUSI 7 | MUSI 8 | MUSI 9 | USI 10.5 | USI 12 |
| Nominal Shaft Diameter D | 6.0 mm | 7.0 mm | 8.0 mm | 9.0 mm | 10.5 mm | 12.0 mm |
| Lead / Pitch P | 2.0 mm | 1.0 / 2.0 mm | 1.0 / 2.0 mm | 1.5 / 2.0 mm | 1.5 / 2.0 mm | 1.5 / 2.0 mm |
| Rated Dynamic Load Ca | 4.0 kN | 6.5 / 6.0 kN | 7.0 / 7.0 kN | 8.5 / 8.5 kN | 13.0 / 13.0 kN | 14.0 / 17.0 kN |
| Rated Static Load C0a | 11.0 / 10.0 kN | 13.0 / 12.0 kN | 16.0 / 16.0 kN | 18.0 / 18.0 kN | 21.0 / 21.0 kN | 27.0 / 27.0 kN |
| Standard Efficiency η | 0.83 / 0.86 | 0.82 / 0.85 | 0.82 / 0.85 | 0.80 / 0.86 | 0.79 / 0.87 | 0.78 / 0.86 |
| Back-drive Efficiency η′ | 0.78 / 0.84 | 0.77 / 0.84 | 0.75 / 0.83 | 0.74 / 0.84 | 0.72 / 0.85 | 0.71 / 0.83 |
| Axial Play Sap | 0.02 mm | 0.02 mm | 0.02 mm | 0.02 mm | 0.02 mm | 0.02 mm |
| Nut Outer Diameter D0 | 12.0 mm | 14.0 mm | 16.0 mm | 15.0 mm | 17.5 mm | 20.0 mm |
| Flange Diameter D1 | 18.0 mm | 20.0 mm | 23.0 mm | 23.0 mm | 24.0 mm | 26.0 mm |
| Total Nut Length Lrs | 26.0 mm | 31.0 mm | 32.0 mm | 26.0 mm | 31.0 mm | 32.0 mm |
How to choose the right micro electric actuator?
In actual selection, thrust should not be the only parameter. The following factors should also be considered.
First, look at load and thrust
If the application only involves small switches, light-load pushing and pulling, or low-speed positioning, a T-type lead screw is enough. If higher thrust and higher efficiency are needed, a ball screw can be selected. If the space is very small but the thrust requirement is high, a planetary roller screw can be considered.
Second, look at speed and duty cycle.
A T-type lead screw can be selected for low-speed and intermittent motion. A ball screw is more suitable for high-speed reciprocating motion and high-frequency cycles. A planetary roller screw is more suitable for long-term high-load operation.
Third, look at whether self-locking is needed
If a vertical load must hold its position after power is cut off, the T-type lead screw has a natural advantage. Ball screws and planetary roller screws have higher efficiency. They usually need motor holding force, a brake, or a mechanical locking structure.
Fourth, look at control accuracy
If closed-loop position control is required, the actuator should be matched with an encoder, Hall sensor, current feedback, or external displacement sensor. The coreless motor itself responds quickly. But final accuracy also depends on screw accuracy, backlash, guide rigidity, and control algorithm.
Fifth, look at space and service life.
The design of a micro electric actuator is often limited by diameter, length, and weight. Under the same external dimensions, screw type, lead, motor speed, reduction ratio, and heat dissipation conditions will all affect final performance.
Conclusion
A high-performance micro electric actuator is not just a simple assembly of a motor and a screw. It must balance space, thrust, speed, efficiency, accuracy, service life, and cost.
If the project focuses on cost and power-off holding, coreless motor + T-type lead screw can be selected. If the project requires higher efficiency and better positioning performance, coreless motor + ball screw can be selected. If the project pursues high load density, high rigidity, and long service life, coreless motor + planetary roller screw can be selected.
Therefore, in micro robots, medical devices, precision instruments, and compact automation systems, the reasonable selection of screw structure is the key factor that determines the performance level of a micro electric actuator.

Dexterous Hand Drive Module
As a dedicated manufacturer of high-performance robotic components, we deliver advanced Dexterous Hand Drive Modules engineered for the next generation of humanoid robots and bionic hands. All our specifications are backed by rigorous, real-world laboratory measurements—ensuring reliable torque, precision, and longevity in demanding applications.
Whether your robotic hand design utilizes direct-drive (DD), linkage mechanisms, or cable-driven (tendon-driven) systems, our modular platform offers the exact actuation solution you need.