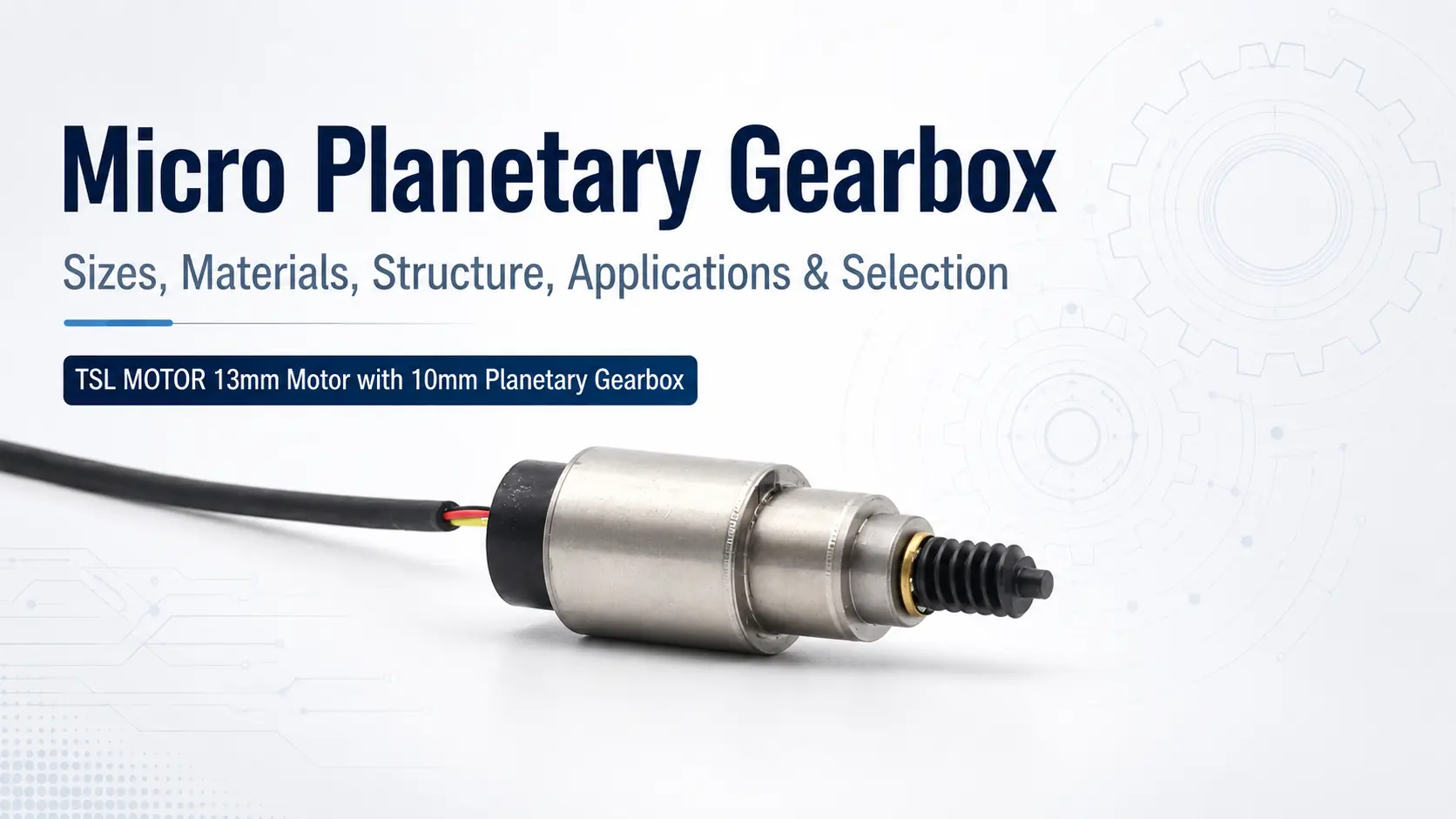
As robots, medical devices, and precision equipment continue to become smaller, micro planetary gearboxes are increasingly used in compact drive systems because of their small size, wide range of gear ratios, and relatively high output torque.
At present, there is no unified industry standard defining the size of a micro planetary gearbox. Different manufacturers classify their products according to their own product ranges. For example, TSL MOTOR includes planetary gearboxes with outer diameters of approximately 6–22 mm within its micro gearbox range.
The performance of a micro planetary gearbox depends not only on its structure but also on the gear materials, manufacturing process, gear ratio, and backlash. This article introduces the structure, materials, characteristics, applications, and selection of micro planetary gearboxes.
“Micro” Is Not a Fixed Size Standard
Different manufacturers have different definitions of the word “micro.” Some manufacturers use the term only for products with diameters below approximately 10 or 15 mm, while others include compact planetary gearboxes with diameters of 40 mm, 50 mm, or even 60 mm.
For example, FAULHABER offers micro planetary gearboxes with diameters of 3.4 mm and 5.8 mm, while maxon provides GP series planetary gearboxes with diameters of 6 mm and 8 mm.
Portescap offers models with diameters of 8 mm, 16 mm, 22 mm, and 32 mm. Neugart also includes 40 mm and 50 mm products within its range of small planetary gearboxes.
This broader classification is closer to actual market conditions because customers are generally more concerned about whether the gearbox fits into the available space and whether its torque, service life, noise, and cost meet the application requirements.
Therefore, when introducing a micro planetary gearbox, it is better to specify its outer diameter, overall length, output shaft dimensions, and compatible motor type. A 22 mm micro planetary gearbox may already be considered relatively large in a precision medical device, while a 42 mm gearbox may still be described as micro or compact in a smart lock or small actuator.
How Does a Micro Planetary Gearbox Work?
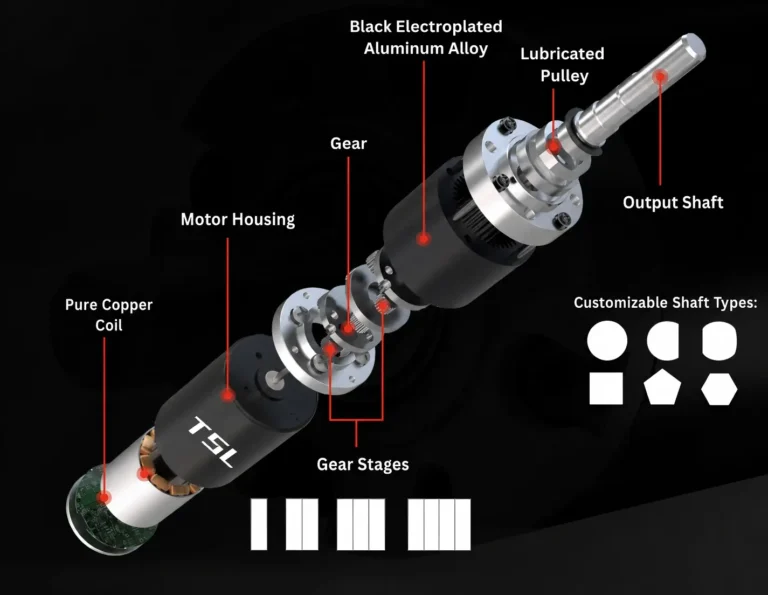
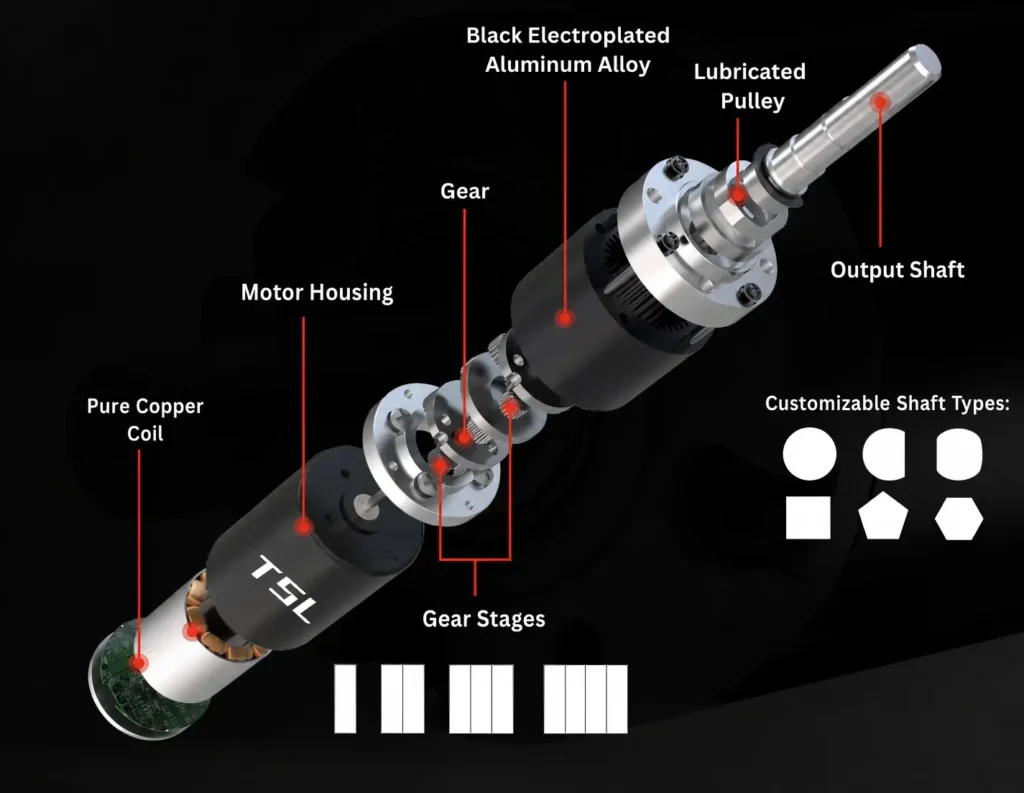
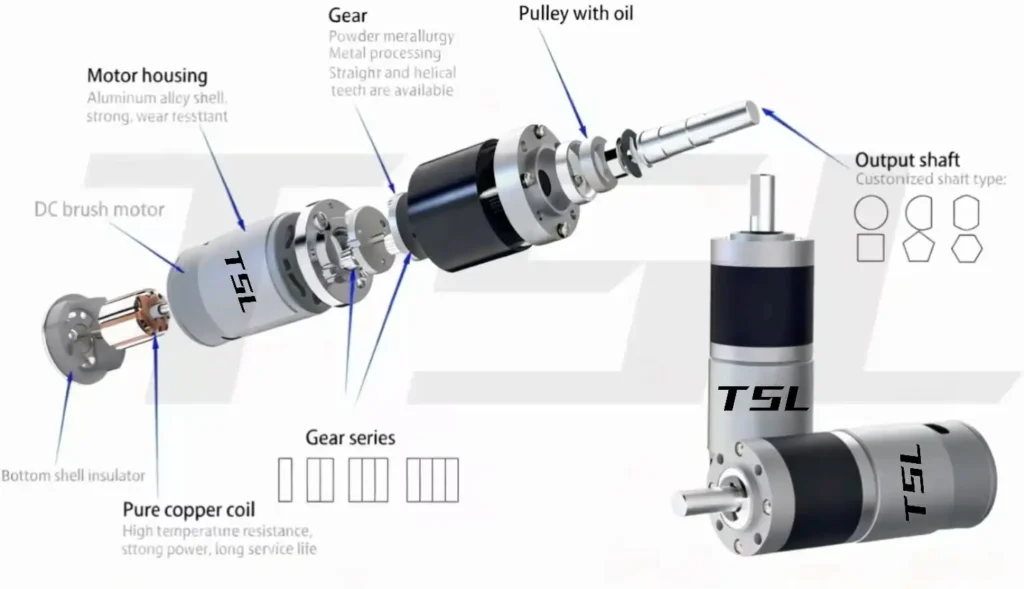
A typical planetary gearbox consists of a sun gear, several planet gears, an internal ring gear, and a planet carrier. The sun gear is located at the center, while the planet gears are arranged around it and engage with both the sun gear and the surrounding ring gear.
When the motor drives the sun gear, the planet gears rotate around their own axes while also revolving around the sun gear. The resulting motion is transferred through the planet carrier to the output shaft.

Because several planet gears can share the load, a planetary gearbox can achieve relatively high torque density within a compact space.
Compared with a conventional parallel-shaft gearbox, a micro planetary gearbox also keeps the input and output shafts on the same axis. This makes it easier to combine with motors, encoders, lead screws, and couplings, making it suitable for robot joints, medical devices, automated grippers, and precision actuators.
Why Is It Suitable for Compact Drive Systems?
Micro motors normally operate at high speeds but provide limited torque directly. After a micro planetary gearbox is installed, the gear ratio reduces the output speed while increasing the usable output torque.
The planetary structure makes efficient use of space, and the use of multiple planet gears helps distribute the load. However, actual load capacity still depends on the gear material, tooth width, module, tooth accuracy, bearings, and heat-treatment process. It cannot be judged only by the gearbox structure.
A micro planetary gearbox can achieve a higher reduction ratio by adding more gear stages. A single-stage gearbox normally provides a relatively low reduction ratio, while multiple stages multiply the total ratio.
However, additional stages also increase the overall length, friction losses, noise sources, and accumulated backlash.
For example, 6 mm maxon GPX 6, the maximum efficiency is approximately 88% for a one-stage gearbox but falls to approximately 52% for a five-stage version. The average no-load backlash also increases from approximately 1.8° to 2.8°.
This shows that a high reduction ratio does not mean that more stages are always better. Torque, efficiency, length, and backlash must be properly balanced.
Classification by Gear Material
Based on the main gear materials, micro planetary gearboxes can generally be divided into plastic gearboxes, metal gearboxes, and plastic-metal hybrid gearboxes.
POM Gears
Polyoxymethylene, commonly known as POM, offers good dimensional stability, self-lubricating properties, and injection-molding capability. It is therefore suitable for the mass production of small and complex gears.

Micro planetary gearboxes using POM gears are generally lightweight, relatively quiet, and economical in large production volumes. They are suitable for smart toys, small household appliances, consumer electronics, and certain medical devices where loads are moderate, operating periods are limited, and noise or cost is important.
However, POM gears also have clear limitations. Under high temperatures, long-term heavy loads, frequent impact loads, or repeated stall conditions, POM is generally less stable than properly designed and treated metal gears.
The operating duty cycle and peak load should therefore be clearly defined during gearbox selection.
Powder Metallurgy Gears
Powder metallurgy is a common manufacturing method for small metal planetary gears. Metal powder is pressed, sintered, and subjected to any required secondary processing to produce small gears with relatively complex shapes.
This method is suitable for projects requiring both large production volumes and controlled manufacturing costs.
The performance of a powder metallurgy gear depends on the material composition, density, sintering process, tooth accuracy, and subsequent treatment. Powder metallurgy should not simply be regarded as a method for producing low-end metal gears.
With a stable manufacturing process, it can provide a good balance between strength, production consistency, and manufacturing efficiency.
Some manufacturers also use metal injection molding, or MIM. TSL MOTOR states that its 6 mm metal planetary gear motor uses an iron-nickel alloy and the MIM process.
This manufacturing method is suitable for extremely small components that would be difficult or expensive to produce through conventional machining.
Steel Micro Planetary Gearboxes
Depending on the required product grade, steel gears may be produced through cutting, hobbing, shaping, precision forming, and heat-treatment processes.
A high-performance steel gearbox is not created simply by replacing plastic gears with metal ones. Tooth surface hardness, core toughness, manufacturing accuracy, concentricity, and surface quality all affect gearbox noise, wear, and service life.
For example, the 8–16 mm planetary gear motors from TSL MOTOR adopt all-steel gears. As a supplier of actuators for dexterous hands, their steel gear design is more widely accepted by customers.
Steel micro planetary gearboxes generally provide higher load capacity and better durability. They are more suitable for continuously operating robot joints, industrial valves, medical pumps, automated actuators, and high-load grippers.
Hybrid POM and Steel Gears
A combination of POM and steel gears is a practical compromise. Designers may use POM gears in the high-speed input stage to reduce noise and rotational inertia, while using steel gears in the higher-load output stages to improve torque capacity.
Another possible arrangement is a steel sun gear combined with POM planet gears. The material of the internal ring gear may also be selected according to the main wear locations.
There is no single fixed combination. The appropriate arrangement depends on speed, torque, service life, noise, and cost requirements.
A hybrid material gearbox should not automatically be regarded as inferior to an all-metal gearbox. In lightly loaded, high-speed, and low-noise applications, a properly designed POM and steel gear combination may be more suitable than an all-metal design.
Why Are Copper Gears Rarely Used?
Brass gears and other copper-alloy components can occasionally be found in small transmission systems. However, copper gears are not commonly used for the main gear train of a micro planetary gearbox.
This does not mean that copper gears are never used. It means that their use is relatively limited compared with steel, powder metallurgy materials, and POM.
The planet gears, sun gear, and ring gear must continuously transmit loads within a very limited space. After suitable heat treatment, steel can achieve relatively high surface hardness and fatigue strength.
POM, on the other hand, offers advantages in lightly loaded applications that require low noise and controlled costs.
Copper alloys may provide properties between those of steel and plastic, but they do not always offer the best overall balance of strength, weight, and cost. Therefore, most micro planetary gearboxes do not use copper gears as their main transmission components.
Brass is more commonly used in certain worm gears, instrument gears, bushings, and corrosion-resistant components than in high-torque-density planetary gear trains.
However, special applications requiring non-magnetic materials, corrosion resistance, or a particular friction pairing may still use copper-alloy components.
Performance Depends on More Than Material
Even when two products are both described as metal micro planetary gearboxes, their actual performance may differ considerably.
In addition to the gear material, factors such as gear accuracy, the number of planet gears, planet pins, ring gear manufacturing method, bearings, lubricant, and assembly concentricity must also be considered.
Backlash is an important parameter in precision transmission systems. Excessive backlash creates lost motion when the motor reverses direction, affecting the positioning of robotic arms, valves, optical adjustment mechanisms, and encoder-based closed-loop systems.
However, the initial backlash should not necessarily be reduced as much as possible. If tooth clearance, lubrication, and thermal expansion are not properly considered, the gearbox may experience increased resistance, higher noise, or premature wear after its temperature rises.
Noise also cannot be judged only by whether the gears are plastic or metal. Tooth profile errors, motor speed, housing resonance, lubrication condition, and assembly eccentricity can all affect the final operating noise.
Common Applications of Micro Planetary Gearboxes
In robotics, micro planetary gearboxes can be used in grippers, finger joints, small rotary joints, wheeled platforms, and linear actuators. They increase torque within a limited space while keeping the motor shaft and output shaft coaxial.
In medical equipment, a micro planetary gearbox may be used in injection pumps, sampling mechanisms, surgical tools, rehabilitation devices, and compact testing equipment.
These applications generally place greater emphasis on smooth operation, low noise, consistent service life, and suitable material selection.
In smart-home products and consumer electronics, micro planetary gearboxes are commonly found in smart locks, electric curtains, camera rotation mechanisms, automatic opening and closing systems, and personal-care devices.
These products are often sensitive to cost, noise, and consistency in mass production.
In industrial applications, micro planetary gearboxes can also be used in compact valves, instrument actuators, sensor adjustment mechanisms, vending machines, and testing fixtures.
Different applications may have very different requirements for gear ratio, material, and service life. A gearbox should therefore not be selected solely according to the industry in which it will be used.
How to Select a Suitable Micro Planetary Gearbox
The first step is to determine the required output speed and operating torque. Dividing the no-load motor speed by the gear ratio only provides a theoretical output speed.
The actual output speed is also affected by the load, gearbox efficiency, supply voltage, and motor control method.
The next step is to distinguish between continuous torque, short-term peak torque, and stall torque. Many micro planetary gearboxes can withstand brief peak loads, but they are not designed to operate continuously at peak torque.
The duty cycle is also important. A smart lock that operates only a few times each day has very different requirements from a pump operating continuously for thousands of hours.
Even when the outer diameter and gear ratio are the same, different internal materials, bearings, and lubrication systems may be required.
The radial and axial loads on the output shaft must also be checked. A micro planetary gearbox is designed primarily to transmit torque, but this does not mean that its output shaft can withstand unlimited belt tension, eccentric impact, or lead-screw axial force.
External support bearings may be required when these loads are high.
Price should be compared only after the main technical requirements have been confirmed. A low-cost gearbox may be suitable for a short-life consumer product, while a high-precision steel gearbox is more appropriate for equipment requiring long-term operation.
The best solution is not necessarily the gearbox with the highest specifications. It is the gearbox that achieves the right balance between dimensions, performance, service life, and cost.
How Should the Gear Ratio and Number of Stages Be Determined?
The total reduction ratio of a micro planetary gearbox is normally obtained by multiplying the ratio of each individual stage.
For example, if each stage has a ratio of 4:1, a three-stage gearbox has a theoretical total reduction ratio of 64:1.
However, output torque does not increase without limit as the total gear ratio increases. Adding stages also increases internal friction, and the overall efficiency normally decreases.
A higher reduction ratio also increases gearbox length, weight, and accumulated backlash. Therefore, the number of stages should be kept reasonable as long as the required output speed can be achieved.
The position of the motor encoder must also be considered in applications requiring high positioning accuracy.
When the encoder is installed on the motor side, gearbox backlash and elastic deformation can still affect the final output position. An encoder installed on the output side measures the actual load position more directly.
What Information Is Required for Customization?
When requesting a quotation from a supplier, it is advisable to provide the motor type, voltage, speed, rated current, required output speed, continuous torque, peak torque, and duty cycle.
The more complete the information, the easier it is to determine a suitable gear ratio, number of stages, and gear material.
The outer-diameter limit, maximum overall length, output shaft dimensions, mounting-hole arrangement, and operating environment should also be specified.
Requirements for encoders, brakes, lead screws, special connectors, waterproofing, or low-temperature operation should be discussed during the early stages of the project.
For noise, backlash, and service life, measurable targets are preferable. Terms such as “low noise,” “high precision,” or “long service life” may be interpreted differently by different manufacturers.
For example, a noise requirement should specify the testing distance, input speed, applied load, and background noise. Service-life requirements can be expressed as continuous operating hours, the number of starts and stops, or the number of forward and reverse cycles.
For mass-production projects, sample validation, life testing, material-change management, and consistency control should also be confirmed.
Because the parts inside a micro planetary gearbox are very small, changes in molds, cutting tools, assembly processes, or lubrication can significantly affect performance.
Standard or Custom Micro Planetary Gearboxes
Standard micro planetary gearboxes offer shorter development times, easier sample availability, and lower initial investment.
When an existing model meets the requirements for outer diameter, gear ratio, output shaft, and mounting structure, using a standard product is normally the more economical choice.
However, a standard model may not fit the complete system perfectly. A difference of only a few millimeters in overall length, a different output shaft diameter, or incompatible mounting holes may require the entire machine structure to be redesigned.
When the production volume is relatively high or the project has specific requirements for space, noise, service life, and output interfaces, a custom micro planetary gearbox may be more suitable.
Common customization options include the gear ratio, output shaft, mounting flange, bearings, lubricant, gear materials, and motor connection method.
Customization does not necessarily mean designing a completely new gearbox from the beginning. Many projects are based on a mature gearbox platform, with only the output shaft, mounting cover, or one gear stage modified.
This approach reduces development risk and shortens the validation process.
Conclusion
There is no unified dimensional boundary for a micro planetary gearbox. A gearbox with a diameter of 3.4 mm can clearly be described as micro, while 6 mm and 8 mm products are typical ultra-compact models.
In terms of material, POM is suitable for lightweight, low-noise, and cost-sensitive applications. Powder metallurgy and MIM are suitable for the mass production of small metal components.
Steel gears are better suited to high-load and long-life applications, while hybrid POM and steel gear trains can achieve a balance between noise, strength, and cost.
When selecting a micro planetary gearbox, the outer diameter, gear ratio, and price should not be the only considerations.
For projects with special requirements for installation space, output shafts, materials, or service life, customization may be more effective than forcing a standard gearbox to fit.
The actual operating conditions should be clearly defined before deciding whether POM, powder metallurgy, steel, or a hybrid gear structure is the most appropriate choice.